
某城市建设一座5 0层的综合大楼,距离1号运营地铁线的最近水平距离为40m,需对开挖基坑、综合大楼及相邻的地铁隧道进行变形监测,变形监测按照《工程测量规范》(GB 50026—2007)和《城市轨道交通工程测量规范》(GB 50308—2008)中变形监测Ⅱ等精度要求实施。 开挖基坑监测:基坑上边缘尺寸为100m*80m,开挖深度为25m,在基坑周边布设了四个工作基点A、B、C、D,变形监测点布设在基坑壁的顶部、中部和底部;监测内容包括水平位移、垂直位移和基坑回填等;基坑开挖初期监测频率为1次/周,随着基
题目
某城市建设一座5 0层的综合大楼,距离1号运营地铁线的最近水平距离为40m,需对开挖基坑、综合大楼及相邻的地铁隧道进行变形监测,变形监测按照《工程测量规范》(GB 50026—2007)和《城市轨道交通工程测量规范》(GB 50308—2008)中变形监测Ⅱ等精度要求实施。
开挖基坑监测:基坑上边缘尺寸为100m*80m,开挖深度为25m,在基坑周边布设了四个工作基点A、B、C、D,变形监测点布设在基坑壁的顶部、中部和底部;监测内容包括水平位移、垂直位移和基坑回填等;基坑开挖初期监测频率为1次/周,随着基坑开挖深度的增加,相应增加监测频率;监测从基坑开挖开始至基坑回填结束。监测到第1 2期时,发现由工作基点A测量的所有监测点整体向上位移,而由工作基点B、C、D测量的监测点整体下沉或不变。综合大楼监测:大楼的监测点布设顶部、中部和基础上,沿主墙角和立柱布设;监测内容包括基础沉降、基础倾斜和大楼倾斜等;监测频率为1次/周;监测从基础施工开始至大楼竣工后1年。
地铁隧道监测:监测范围为综合大楼相邻的2 00m区段;监测内容包括隧道拱顶下沉、衬砌结构收敛变形及侧墙位移等;变形监测点接断面布设,断面间距为5m,每个断面上布设5个监测点,每个点上安装圆棱镜,采用2台高精度自动全站仪自动测量;监测频率为2次/天;隧道监测从基坑开挖前一个月至大楼竣工后1年。
监测数据采用SQL数据库进行管理,数据库表单包括周期表单。工程表单、原始数据表单、测量仪器表单、坐标与高程表单等。监测成果包含监测点坐标数据、变形过程线及成果分析等。
【问题】
1.该段地铁隧道变形监测中,总共需布设多少个断面监测点?对两台高精度自动全站仪的安置位置有什么要求?
2.利用数据库生成监测点的变形过程线时,需要调用到哪些表单?并说明理由。
3.从测量角度判断有工作基点A测量的基坑监测点向上位移的原因,并提出验证方法。
相似考题
更多“某城市建设一座5 0层的综合大楼,距离1号运营地铁线的最近水平距离为40m,需对开挖基坑、综合大楼及相邻的地铁隧道进行变形监测,变形监测按照《工程测量规范》(GB 50026—2007)和《城市轨道交通工程测量规范》(GB 50308—2008)中变形监测Ⅱ等精度要求实施。 ”相关问题
-
第1题:
根据《工程测量规范》(GB50026—2007),利用全站仪进行距离测量作业时,应符合下列规定:测站对中误差和反光镜对中误差不应大于()。A:1mm
B:2mm
C:3mm
D:4mm答案:B解析:《工程测量规范》(GB50026—2007)第3.3.19条规定:利用全站仪进行距离测量作业时,测站对中误差和反光镜对中误差不应大于2mm。故选B。 -
第2题:
1.工程概况
某轨道交通线某区间盾构工程将通过正在施工的某住宅小区工地.地铁隧道将从工程桩中间穿过,两者最近距离1.7~1.8m.该地段工程地质条件差,存在较厚的淤泥层和砂层.住宅小区基坑用搅拌桩、旋喷桩止水,支护采用喷锚支护.在采取相关加固措施以保证周边已有构筑物安全的同时,应进行严密的监测,以确保周边构筑物安全.
[问题]
1.为完成变形监测任务,除了布设变形监测点外,还布设了测量基准点和工作基点,则布设测量基准点和工作基点的目的是什么?
2.对变形监测资料进行分析是变形监测的主要工作之一,常用的方法有哪几种?
3.该项目完成后,提供给甲方的成果应包含哪些内容?答案:解析:1.为完成变形监测任务,除了布设变形监测点外,还布设了测量基准点和工作基点,则布设测量基准点和工作基点的目的是什么?
布设测量基准点,是为了保证测量的基准统一,布置工作基点是为了便于测量工作,并减小测量误差.
必须保证基准点的稳定性,定期进行测量、分析,工作基点与测量基准点间也必须进行测量,以得到工作基点的坐标值,同时可根据坐标值的差异,判断工作基点的稳定性.
2.对变形监测资料进行分析是变形监测的主要工作之一,常用的方法有哪几种?
(1)作图分析,即将观测资料绘制成各种曲线,常用的是将观测资料按时间顺序绘制成过程线.
(2)统计分析,即用数理统计方法分析计算各种观测物理量的变化规律,分析观测物理量的周期性、相关性和发展趋势.
2.对变形监测资料进行分析是变形监测的主要工作之一,常用的方法有哪几种?
(3)对比分析.
(4)建模分析,即建立数学模型,用以分离影响因素,研究观测物理量变化规律,进行预报和实现安全控制.常用的数学模型有统计模型、确定性模型和混合模型.
3.该项目完成后,提供给甲方的成果应包含哪些内容?
项目完成后,应提交的成果如下:
(1)技术设计书和测量方案.
(2)监测网和监测点布置图.
(3)标石、标志规格及埋设图.
(4)仪器的检校资料.
3.该项目完成后,提供给甲方的成果应包含哪些内容?
项目完成后,应提交的成果如下:
(5)原始观测记录.
(6)平差计算、成果质量评定资料.
(7)变形观测数据处理分析和预报成果资料.
(8)变形过程和变形分布图表.
(9)变形监测、分析和预报的技术报告. -
第3题:
1.工程概况
××轨道交通线某区间盾构工程将通过正在施工的某住宅小区工地。目前,该工地基坑土方开挖已经完成,正在进行工程桩施工。地铁隧道将从工程桩中间穿过,两者最近距离1.7~1.8 m。
该地段工程地质条件差,存在较厚的淤泥层和砂层。住宅小区基坑用搅拌桩、旋喷桩止水,支护采用喷锚支护。
目前,住宅小区周边较大范围内地面有明显沉降,该区域建筑大部分为多层建筑,其基础有的采用静压桩(桩长12~18 m),有的采用锤击灌注桩(持力层为强风化层),另有部分建筑物基础形式未明。
由于地质和设计原因,该地段地铁隧道顶部部分需在砂层中成孔,成孔过程中流沙和降水均可能会对周边环境造成如下影响:
(1)成孔过程中流沙可能会引起周边地面、建筑物沉降。
(2)成孔过程中流沙可能会引起周边土体、工程桩位移。
(3)成孔过程中流沙可能会引起周边水位下降,导致淤泥层固结压缩,引起周边地面、建筑物沉降。
(4)隧道穿过止水幕墙时对止水幕墙的扰动和周边土体变形而引起的止水幕墙变形可能拉裂幕墙,造成基坑漏水,从而导致周边地面、建筑物沉降。
基于上述考虑,在采取相关加固措施以保证周边已有建筑物安全的同时,应进行严密的监测,以确保周边建筑物安全。
2.实施技术方案编制依据
(1)GB 50007-2011《建筑地基基础设计规范》。
(2)GB 50308-2008《城市轨道交通工程测量规范》。
(3)JGJ 8-2007《建筑变形测量规范》。
(4)GB 50026-2007《工程测量规范》。
(5)GB 12897-2006《国家一、二等水准测量规范》。
(6)CJJ/T 8-2011《城市测量规范》。
(7)轨道交通线区间盾构工程住宅小区段相关图纸。
3.监测项目
为准确了解盾构施工对周边环境和已有建筑物的影响,及时发现可能存在的危险并采取
相应措施将地铁施工对周边的不利影响减至最小,确定以周边建筑物、地面(管线)沉降测量、基坑止水幕墙顶部位移和沉降测量、工程桩顶部水平位移测量为主要观测项目。
具体监测项目及内容见表3.5.1。

4.监测方法和测点布置
(1)周边建筑物、地面(管线)沉降监测。沉降监测选用进口精密水准仪配合殷钢尺测量,仪器标称精度±0.4mm/km。
参照GB 50026-2007《工程测量规范》、JGJ 8-2007《建筑变形测量规范》等有关规范,沉降按三等变形测量的精度要求施测,外业观测按二等水准测量的技术要求作业。
计划共埋设6个测量基准点:在住宅小区埋设3个测量基准点(其中2个为深埋式基准点,另1个基准点布置在施工影响范围外的、沉降已经稳定的桩基建筑物的结构柱位),在邻近小区埋设3个深埋式基准点。所有深埋式基准点均钻孔至岩层,然后在其顶部设置护罩。水准测量须在水准基点稳定后方可进行观测。基准网水准线路长约25 km。
建筑物沉降观测点为直径14 mm的膨胀螺丝,膨胀螺丝杆与墙面成60°,以保证每次测量测点与测尺在同一位置接触;对于基坑止水幕墙顶部沉降观测点,为减少观测点埋设高度和被破坏的概率,膨胀螺丝顶部与周围高差小于1cm;对于地面沉降观测点埋设,先钻直径不小于24 mm的孔,再埋直径14 mm或16 mm的钢筋,钢筋穿透路面,且比路面略高。
本项目监测以建筑物结构沉降测量为主,同时测量周边地面沉降,共布置165个观测点。
每栋楼根据距离地铁隧道的远近、基础形式的不同布置2~12个结构沉降观测点和1~4个地面沉降观测点;在住宅小区基坑南侧管线位置布置8个地面沉降观测点;在隧道与止水幕墙交叉的2个位置各布置6-8个地面沉降观测点。
(2)基坑止水幕墙顶部位移和沉降监测。监测工作基点在基坑四周布置,同时在远处稳固的地方布置基准点,共布设12个基准点和工作基点,基准网与工程桩顶部水平位移测量公用。水平位移监测控制网的主要技术要求见表3.5.2。

水平位移观测使用精密全站仪配合棱镜采用极坐标法施测;测量采用二等水平位移标准测量,变形点的点位中误差不大于3 mm;测点采用强制对中,以减少对中误差。沉降监测方法同周边建筑物、地面(管线)沉降监测。
基坑止水幕墙顶部位移和沉降监测共布置21个观测点。在止水幕墙的顶部布置观测点,测点间距15~30 m。
(3)工程桩顶部水平位移测量。工程桩顶部水平位移测量方法与基坑止水幕墙顶部位移测量相同。工程桩顶部水平位移测量共布置20个观测点。在隧道两边82条工程桩中选择20条桩,在桩顶布置水平位移观测点。
5.监测频率
监测时间从××××年××月开始至××××年××月结束,历时约6个月,分为三阶段:地铁隧道施工前、地铁隧道施工中、地铁隧道施工后。
由于本项目监测时间较短,基准网没有复测计划,但每次观测前必须对基点或工作基点进行稳定性检查。
从工程实际情况出发可将测量分为两部分:一部分是所有测点定期普遍测量;一部分是在隧道经过位置前后的测点进行加密观测。
观测周期、次数初步确定如下:
(1)各监测项目测初值1次。
(2)地铁隧道施工前期阶段(1个月),7天测量一次,约测4次。
(3)地铗隧道施工阶段(2个月),所有测点3天测量1次,约测量20次;隧道经过位置附近(盾构机前后50 m、隧道左右边线15 m范围内)的测点(沉降点约50个,水平位移点约15个)1天测量2次,约测12次。
(4)地铁隧道施工后(3个月),第一个月7天测量1次,约4次;第二个月15天测量1次,约2次,第三个月测量1次。
总测量次数约为44次。
[问题]
1.为完成变形监测任务,除了布设变形监测点外,还布设了测量基准点和工作基点,则布设测量基准点和工作基点的目的是什么?
2.对变形监测资料进行分析是变形监测的主要工作之一,常用的方法有哪几种?
3.该项目完成后,提供给甲方的成果应包含哪些内容?
答案:解析:1.
布设测量基准点,是为了保证测量的基准统一,布置工
作基点是为了便于测量工作,并减小测量误差。必须保证基准点的稳定性,定期进行测量、分析,工作基点与测量基准点间也必须进行测量,以得到工作基点的坐标值,同时可根据坐标值的差异,判断工作基点的稳定性。
2.
常用变形监测资料分析方法如下:
(1)作图分析,即将观测资料绘制成各种曲线,常用的是将观测资料按时间顺序绘制成过程线。
(2)统计分析,即用数理统计方法分析计算各种观测物理量的变化规律,分析观测物理量的周期性、相关性和发展趋势。
(3)对比分析。
(4)建模分析,即建立数学模型,用以分离影响因素,研究观测物理量变化规律.进行预报和实现安全控制。常用的数学模型有统计模型、确定性模型和混合模型。
3.
项目完成后,应提交的成果如下:
(1)技术设计书和测量方案。
(2)监测网和监测点布置图。
(3)标石、标志规格及埋设图。
(4)仪器检定和检校资料。
(5)原始观测记录。
(6)平差计算、成果质量评定资料。
(7)变形观测数据处理分析和预报成果资料。
(8)变形过程和变形分布图表。
(9)变形监测、分析和预报的技术报告。 -
第4题:
按规范GB50026-2007,变形测量的等级划分为()个等级
A2
B3
C4
D5
C
略 -
第5题:
变形监测网,应由部分基准点、工作基点和变形观测点构成。监测周期,应根据监测体的()等因素综合确定。监测期间,应根据变形量的变化情况适当调整。
- A、变形特征
- B、变形速率
- C、观测精度
- D、工程地质条件
正确答案:A,B,C,D -
第6题:
基坑工程监测的内容不包括()。
- A、坑周土体变位测量
- B、围护结构变形测量量及内力测量
- C、支撑结构弯矩测量
- D、土压力测量
正确答案:C -
第7题:
按现行《工程测量规范》(GB50026-2007),变形测量过程中必须立即报告建设单位和施工单位采取相应安全措施的情况包括()
- A、变形量达到预警或接近允许值
- B、变形量出现异常变化
- C、少数变形观测点遭到破坏
- D、工程或地表的裂缝迅速扩大
- E、数据处理结果不符合技术方案要求
正确答案:A,B,D -
第8题:
《工程测量规范》(GB50026-2007)以极限误差作为衡量测绘精度的标准。
正确答案:错误 -
第9题:
工程测量的主要任务包括()等。
- A、水准测量、地形测量、施工放样、变形监测
- B、地形测量、变形监测、角度测量,施工放样
- C、地形测量、施工放样、距离测量、变形监测
- D、控制测量、变形监测、施工放样、地形测量
正确答案:D -
第10题:
多选题变形监测周期,应根据监测体的()等因素综合确定。A变形特征
B变形速率
C观测点布设位置
D观测精度
E工程地质条件
正确答案: B,D解析: 暂无解析 -
第11题:
单选题按规范GB50026-2007,变形测量的等级划分为()个等级A2
B3
C4
D5
正确答案: C解析: 暂无解析 -
第12题:
问答题某城市建设一座50层的综合大楼,距离1号运营地铁线的最近水平距离为40m,需对开挖基坑、综合大楼及相邻的地铁隧道进行变形监测,变形监测按照《工程测量规范》( GB 50026-2007)和《城市轨道交通工程测量规范》(GB 50308-2008)中变形监测Ⅱ等精度要求实施。 开挖基坑监测:基坑上边缘尺寸为100m×80m.开挖深度为25m,在基坑周边布设了四个工作基点A.B.C.D,变形监测点布设在基坑壁的顶部、中部和底部;监测内容包括水平位移、垂直位移和基坑回填等;基坑开挖初期监测频率为1次/周,随着基坑开挖深度的增加,相应增加监测频率;监测从基坑开挖开始至基坑回填结束。监测到第12期时,发现由工作基点A测量的所有监测点整体向上位移,而由工作基点B.C.D测量的监测点整体下沉或不变。 综合大楼监测:大楼的监测点布在设顶部、中部和基础上,沿主墙角和立柱布设;监测内容包括基础沉降、基础倾斜和大楼倾斜等;监测频率为1次/周;监测从基础施工开始至大楼竣工后1年。地铁隧道监测:监测范围为综合大楼相邻的200m区段;监测内容包括隧道拱顶下沉、衬砌结构收敛变形及侧墙位移等;变形监测点按断面布设,断面间距为5m,每个断面上布设5个监测点,每个点上安装圆棱镜,采用2台高精度自动全站仪自动测量;监测频率为2次/天;隧道监测从基坑开挖前一个月至大楼竣工后1年。 监测数据采用SQL数据库进行管理,数据库表单包括周期表单、工程表单、原始数据表单、测量仪器表单、坐标与高程表单等。监测成果包含监测点坐标数据、变形过程线及成果分析等。【问题】1该段地铁隧道变形监测中,总共需布设多少个断面监测点?对两台高精度自动全站仪的安置位置有什么要求?2利用数据库生成监测点的变形过程线时,需要调用到哪些表单?并说明理由。3从测量角度判断有工作基点A测量的基坑监测点向上位移的原因.并提出验证方法。正确答案:解析: -
第13题:
对某工程进行变形观测时,其允许变形值为±40mm。下列各变形监测网精度能满足对其进行监测的最低精度是( )。A、±1mm
B、±2mm
C、±3mm
D、±4mm答案:D解析:变形监测的等级及精度要求取决于设计变形允许值和监测目的。中误差不超过设计允许值的 1/10-1/20 或 1-2mm。 -
第14题:
自动化变形监测
1)工程概况
××市××大厦基坑北侧与××地铁1号线隧道相邻,最近水平距离约9m。为了确保基坑支护顺利施工,保证××市地铁1号线正常运营,需对地铁1号线隧道进行变形监测,实时了解和掌握在基坑开挖过程中地铁隧道的变形情况,确保地铁隧道的安全。同时,可为基坑支护施工提供及时的反馈信息,为信息化施工提供科学的监测数据和报告。
××地铁1号线运营时间一般从早6:00到晚23:00,由于在运营时间测量人员无法下隧道测量,只能在夜间停运后测量。而白天是基坑施工的主要时间,也是监测的关键时间,因此,工程选择了基于自动全站仪开发的无接触式自动测量系统,实现了对运营地铁隧道结构三维变形位移的自动监测系统。
2)基准点及工作基点设置
(1)基准点的布设
监测区间线路离××车站及××车辆段均较近。本监测项目的基准点考虑选择在××车站内,选择采用有强制归心装置的观测墩。左出入段线和左线各设置3个基准点。为保证成果的可靠性,定期检测基准点的稳定性。
(2)工作基点的布设
为方便测量机器人自动搜寻目标,以及保证各监测点精度均匀,工作基站拟设置于监测范围中部的隧道侧墙上,托架伸出长度约400mm,左出入段线和左线各设置1个工作基点。基点网点可与地铁原基标控制系统联测或采用独立坐标系统。
(3)变形监测点的布设
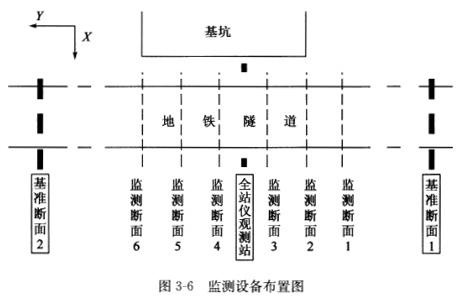
变形监测点设计要求的断面按每20m左右布设,每个断面在轨道附近的道床上布设2个监测点,即每个测断面布设2个监测点,全段线共布设6个观测断面。各断面观测点用连接件配小规格反射棱镜,用膨胀螺栓及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点,见图3-6。
3)测量机器人自动化监测
测量机器人自动化监测系统以基于1台测量机器人的有合作目标(照准棱镜)的变形监测系统为基本单元,可以由多个基本单元通过Internet联结起来组合而形成一个测量机器人远程网络监测系统,系统提供有线和无线两种组网方式。
(1)系统组成
远程无线遥控测量机器人变形监测和分析系统主要由3个单元组成:控制单元、无线通信单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定IP的万维网发送指令和接收数据;无线通信单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。
(2)硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成:
①测量机器人。测量机器人具有发动机驱动和目标自动识别等功能。测量机器人选用TS30,其静态测角精度为±0.5″,测距精度为±(0. 35mm+0. 7ppm*D),自动目标识别的有效距离可达1000m,望远镜照准精度为2mm/500m。
②无线通信模块。实现系统控制中心与测量机器人之间的数据传输。
③系统控制中心。系统控制中心的主要任务之一是数据处理。
(3)软件构成
无线遥控测量机器人变形监测和分析系统软件主要由三部分组成:测量机器人机载软件、无线通信软件模块和控制中心软件包。
4)监测数据处理
测量机器人自动监测系统是根据全站仪的极坐标三维测量原理。由于该工程测量范围小,两端基准点之间的距离为150m左右,同时列车的运行,使得测量区域内的各点的气象条件较为一致。因此,通过一定的观测数据处理方法,可以消除由于不同测量周期测量时的气象变化所引起的测量误差。
5)小结
基于测量机器人的自动化监测系统,具有简便灵活、无人值守、实时动态的监测特点,克服了传统测量方法的不足,极大地提高了工作效率。监测系统为基坑开挖提供了准确、及时的地铁隧道变形数据,是运营地铁隧道变形监测的理想手段。随着我国城市地铁建设的大规模进行,自动监测已经成为必不可少的一种测量手段,发挥着日益重要的作用,随着地铁的发展,监测系统的前景应该不断发展和完善。
6)问题
(1)简述变形测量实施的程序与要求。
(2)简述全站仪自动跟踪测量的主要技术要求。
(3)监测项目的变形分析有哪些内容?
答案:解析:自动化变形监测
(1)简述变形测量实施的程序与要求。
①按测定沉降或位移的要求,分别选定测量点,埋设相应标石标志,建立高程控制网、平面控制网。
②按确定的观测周期与总次数,对监测网进行观测。新建的大型和重要建筑,应以施工开始进行系统的观测,直至变形达到规定的稳定程度为止。
③对各周期观测成果及时处理,并选取与实际变形情况接近或一致的参考系进行严密平差计算和精度评定。对重要的监测成果,进行变形分析,并对变形趋势做出预报。
(2)简述全站仪自动跟踪测量的主要技术要求。
①测站应设立在基准点或工作基点上,并采用有强制对中装置的观测台或观测墩;测站视野应开阔无遮挡,周围应设立安全警示标志;同时应具有防水、防尘设施。
②监测体上的变形观测点宜采用观测棱镜,距离较短时也可采用反射片。
③数据通信电缆宜采用光缆或专用数据电缆,并应安全敷设,连接处应采取绝缘和防水措施。
④作业前应将自动观测成果与人工测量成果进行比对,确保自动观测成果无误后,方能进行自动监测。
⑤测站和数据终端设备应备有不间断电源。
⑥数据处理软件,应具有观测数据自动检核、超限数据自动处理、不合格数据自动重测的功能,观测目标被遮挡时,可自动延时观测处理和变形数据自动处理、分析、预报和预警等功能。
(3)监测项目的变形分析有哪些内容?
监测项目的变形分析,对于较大规模的或重要的项目,宜包括下列内容;较小规模的项目,至少应包括前三项内容。
①观测成果的可靠性。
②监测体的累计变形量和两相邻观测周期的相对变形量分析。
③相关影响因素(荷载、气象和地质等)的作用分析。
④回归分析。
⑤有限元分析。
-
第15题:
为防止支护结构发生坍塌进行基坑支护监测,下面属于基坑监测内容的是( )等。A.水平位移和垂直位移
B.地表裂缝
C.基坑顶部建(构)筑物变形
D.地下水位
E.支护结构内力及变形监测项目的内容有:基坑顶部水平位移和垂直位移、地表裂缝、基坑顶部建(构)筑物变形、支护结构内力及变形等。监测项目的选择应考虑基坑的安全等级、支护结构变形控制要求、地质和支护结构的特点。监测方案可根据设计要求、护壁稳定性、周边环境和施工进程等因素确定。答案:A,B,C,E解析: -
第16题:
按规范GB50026-2007,变形测量的等级划分为()个等级
- A、2
- B、3
- C、4
- D、5
正确答案:C -
第17题:
水利工程测量的任务包括测图和()三个方面。
- A、变形监测
- B、放样
- C、测坐标
- D、测距离
正确答案:A,B -
第18题:
某地铁将要通过正在施工的住宅小区工地。工地地质条件差,目前工地基坑开挖已完成,正进行工程桩施工。住宅小区周边较大范围内地面有明显沉降。地铁采用盾构施工,从工程桩中间穿过,两者之间最近距离1.7~1.8m。因此地铁施工可能引起周边土体、工程桩位移和周边地面、建筑物沉降。基于上述考虑,在采取相关的加固工程措施的同时,应进行变形监测,确保周边建筑物安全。下列哪些属于变形监测专门的测量技术和手段?()
- A、液体静力水准测量
- B、准直测量
- C、裂缝测量
- D、整体测量
- E、摄影测量
正确答案:A,B,C,E -
第19题:
《工程测量规范》(GB50026-2007)以2倍中误差作为极限误差。
正确答案:正确 -
第20题:
变形监测周期,应根据监测体的()等因素综合确定。
- A、变形特征
- B、变形速率
- C、观测点布设位置
- D、观测精度
- E、工程地质条件
正确答案:A,B,D,E -
第21题:
单选题对某工程进行变形观测时,其允许变形值为±40mm。下列各变形监测网精度能满足对其进行监测的最低精度是( )。A±1mm
B±2mm
C±3mm
D±4mm
正确答案: B解析: -
第22题:
单选题工程测量的主要任务包括()等。A水准测量、地形测量、施工放样、变形监测
B地形测量、变形监测、角度测量,施工放样
C地形测量、施工放样、距离测量、变形监测
D控制测量、变形监测、施工放样、地形测量
正确答案: D解析: 暂无解析 -
第23题:
问答题按照《建筑基坑工程监测技术规范》(GB50497-2010),基坑工程现场监测的对象包括哪些内容?正确答案: (1)支护结构。
(2)地下水状况。
(3)基坑底部及周边土体。
(4)周边建筑。
(5)周边管线及设施。
(6)周边重要的道路。
(7)其他应监测的对象。解析: 暂无解析