
2、(2分)刚创建的Mytool工具坐标系为空坐标系时,不需要对其参赛进行标定。()
题目
2、(2分)刚创建的Mytool工具坐标系为空坐标系时,不需要对其参赛进行标定。()
相似考题
更多“2、(2分)刚创建的Mytool工具坐标系为空坐标系时,不需要对其参赛进行标定。()”相关问题
-
第1题:
创建工具坐标系时可以使用( )方法进行工具坐标系标定。A.四点和六点
B.三点
C.五点
D.九点
参考答案:A
-
第2题:
采用三点法进行工件坐标系标定时,不需要记录( )坐标。A.原点
B.X轴方向
C.Y轴方向
D.Z轴方向
参考答案:D
-
第3题:
两台机器人或多台机器人协作时,若有一台安装于地面,另一台或多台倒置于地面,可以标定一个共同( )。A.基坐标系
B.世界坐标系
C.工具坐标系
D.工件坐标系
参考答案:D
-
第4题:
以下坐标系可以由用户创建的是( )。①、基坐标系②、工件坐标系③、工具坐标系④、轴坐标系A.①②③④
B.②③
C.①②③
D.①③④
参考答案:B
-
第5题:
( )定义机器人到达预设目标时所使用工具的位置。A.基坐标系
B.世界坐标系
C.工具坐标系
D.工件坐标系
参考答案:C
-
第6题:
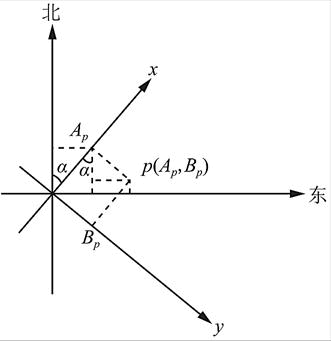
设A、B坐标系为施工坐标系,A轴在测量坐标系中的方位角为α,施工坐标系的原点为O′,其坐标为x0和y0,下列何项表达了点p的施工坐标Ap、Bp转换为测量坐标xp、yp的公式( )。
 答案:A解析:一般以纵轴为x,横轴为y,方位角则是以坐标纵轴北方向为起始,顺时针量到直线的水平角,如题11解图所示,xp-x0=Apcosα-Bpsinα,yp-y0=Apsinα+Bpcosα。
答案:A解析:一般以纵轴为x,横轴为y,方位角则是以坐标纵轴北方向为起始,顺时针量到直线的水平角,如题11解图所示,xp-x0=Apcosα-Bpsinα,yp-y0=Apsinα+Bpcosα。
-
第7题:
当采用CGCS2000作为项目坐标系进行GPS RTK作业时,()。
- A、应进行WGS84坐标系至CGCS2000坐标系的三参转换
- B、应进行WGS84坐标系至CGCS2000坐标系的七参转换
- C、先进行七参转换,再进行三参转换
- D、不需在两坐标系间进行转换
正确答案:D -
第8题:
数控机床以右手直角坐标系为标准坐标系。
正确答案:正确 -
第9题:
2000国家大地坐标系为()。
正确答案:地心空间直角坐标系 -
第10题:
单选题编程人员在数控编程时,一般常使用的坐标系为()A机床坐标系
B机床参考坐标系
C直角坐标系
D工件坐标系
正确答案: A解析: 暂无解析 -
第11题:
单选题测量中常用的平面直角坐标系统与数学中的平面直角坐标系象限编号的区别是()A数学坐标系为顺时针编号,测量坐标系为顺时针编号
B数学坐标系为顺时针编号,测量坐标系为逆时针编号
C数学坐标系为逆时针编号,测量坐标系为顺时针编号
D数学坐标系为逆时针编号,测量坐标系为逆时针编号
正确答案: D解析: 暂无解析 -
第12题:
判断题1954年北京坐标系及1980西安坐标系为参心坐标系。A对
B错
正确答案: 对解析: 暂无解析 -
第13题:
工具坐标标定最少采用( )个点标定,即可自动生成工具坐标系的参数。A.3
B.4
C.5
D.6
参考答案:B
-
第14题:
创建工件坐标系时可以使用( )方法进行工件坐标系标定。A.四点和六点
B.三点
C.五点
D.九点
参考答案:B
-
第15题:
机器人在示教操作时,末端点位信息都是基于( )进行记录和调整。A.基坐标系
B.世界坐标系
C.工具坐标系
D.工件坐标系
参考答案:C
-
第16题:
( )与工件相关,通常是最适于对机器人进行编程的坐标系。A.基坐标系
B.世界坐标系
C.工具坐标系
D.工件坐标系
参考答案:D
-
第17题:
华数机器人需要用户权限的是( )。A.校准
B.工具坐标系标定
C.工件坐标系标定
D.限位修改
参考答案:A
-
第18题:
编程人员在编程时在工件上指定某一固定点为原点,建立的坐标系为()
- A、标准坐标系
- B、机床坐标系
- C、右手直角笛卡儿坐标系
- D、工件坐标系
正确答案:A -
第19题:
1954年北京坐标系及1980西安坐标系为参心坐标系。
正确答案:正确 -
第20题:
当需要对象沿着自身的轴向进行变换时使用最佳坐标系是()。
- A、视图坐标系
- B、局部坐标系
- C、拾取坐标系
- D、父对象坐标系
正确答案:B -
第21题:
单选题高斯扩散模式采用的坐标系为()。A左手坐标系
B右手坐标系
C极坐标
D没有关于坐标系的假设
正确答案: B解析: 暂无解析 -
第22题:
单选题在UGNX三维坐标系统中,执行建模操作时使用最频繁的坐标系为(),熟练地掌握该坐标系的操作方法是所有建模的基础。AACS
BWCS
CFCS
DUCS
正确答案: D解析: 暂无解析 -
第23题:
单选题当采用CGCS2000作为项目坐标系进行GPS RTK作业时,()。A应进行WGS84坐标系至CGCS2000坐标系的三参转换
B应进行WGS84坐标系至CGCS2000坐标系的七参转换
C先进行七参转换,再进行三参转换
D不需在两坐标系间进行转换
正确答案: C解析: 暂无解析 -
第24题:
单选题当需要对象沿着自身的轴向进行变换时使用最佳坐标系是()。A视图坐标系
B局部坐标系
C拾取坐标系
D父对象坐标系
正确答案: D解析: 暂无解析