
圆弧运动就是机器人末端TCP从圆弧起始点,经过中间点到结束点做圆弧轨迹运动。()
题目
圆弧运动就是机器人末端TCP从圆弧起始点,经过中间点到结束点做圆弧轨迹运动。()
相似考题
参考答案和解析
更多“圆弧运动就是机器人末端TCP从圆弧起始点,经过中间点到结束点做圆弧轨迹运动。()”相关问题
-
第1题:
机器人运动的类型不包括( )。A.直线运动
B.关节定位
C.圆弧运动
D.曲线运动
参考答案:D
-
第2题:
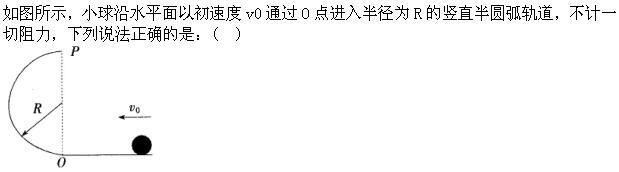 A.球进入竖直半圆弧轨道后做匀速圆周运动
A.球进入竖直半圆弧轨道后做匀速圆周运动
B.若小球能通过半圆弧最高点P,则球运动到P时向心力恰好为零
C.
D.若小球恰能通过半圆弧最高点P,则小球落地点离O点的水平距离为2R答案:D解析: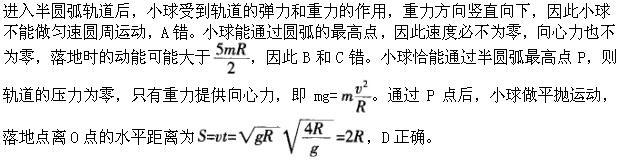
-
第3题:
锉削外圆弧面采用的是板锉,要完成的运动是()
- A、前进运动
- B、锉刀绕工件圆弧中心的转动
- C、前进运动和锉刀绕工件圆弧中心的转动
- D、前进运动和随圆弧面向左或向右移动
正确答案:C -
第4题:
圆弧插补参数I、J、K是圆弧终点到圆心的矢量坐标。
正确答案:错误 -
第5题:
圆弧形车刀的刀位点在该圆弧的()。
- A、起始点
- B、终止点
- C、中点
- D、圆心点
正确答案:C -
第6题:
圆弧插补段程序中,若采用圆弧半径R编程时,从始点到终点存在两条圆弧线段,当( )时,用-R表示圆弧半径。
- A、圆弧小于或等于180度;
- B、圆弧大于或等于180度;
- C、圆弧小于180度
- D、圆弧大于180度
正确答案:D -
第7题:
圆弧插补段程序中,若采用圆弧半径R编程时,从起始点到终点存在两条圆弧线段,当()时,用-R表示圆弧半径。
- A、圆弧小于或等于180°
- B、圆弧大于或等于180°
- C、圆弧小于180°
- D、圆弧大于180°
正确答案:D -
第8题:
锉削外圆弧面采用的是板锉,要完成的运动是()。
- A、前进运动
- B、锉刀绕工件圆弧中心的转动
- C、前进运动和锉刀绕工件圆弧中心的转动
正确答案:C -
第9题:
对单管直缸式接力器而言,()
- A、活塞为直线运动,控制环为圆弧运动
- B、活塞为圆弧运动,控制环为直线运动
- C、活塞为直线运动,控制环为直线运动
- D、活塞为圆弧运动,控制环为圆弧运动
正确答案:A -
第10题:
若系统仅具有两个开环极点和一个开环零点,则根轨迹是()。
- A、圆弧
- B、直线
- C、圆弧或直线
正确答案:C -
第11题:
单选题按照机械运动的轨迹分类,数控钻床属于()控制数控机床。A点位
B直线
C圆弧
D轮廓
正确答案: C解析: 数控钻床是数字控制的以钻削为主的孔加工机床,由于加工中心的发展,绝大多数数控钻床已被加工中心取代。但有些以钻削为主要加工工序的零件仍需应用数控钻床来加工,如加工印刷电路板等,故数控钻床还有一定的需要量。
大多数数控钻床用点位控制,同时沿两轴或三轴移动以减少定位时间。 -
第12题:
单选题对单管直缸式接力器而言,()A活塞为直线运动,控制环为圆弧运动
B活塞为圆弧运动,控制环为直线运动
C活塞为直线运动,控制环为直线运动
D活塞为圆弧运动,控制环为圆弧运动
正确答案: C解析: 暂无解析 -
第13题:
锉削内圆弧面时,锉刀要完成的动作是( )。
A.前进运动和锉刀绕工件圆弧中心的转动
B.前进运动和随圆弧面向左或向右移动
C.前进运动和绕锉刀中心线转动
D.前进运动、随圆弧面向左或向右移动和绕锉刀中心线转动
正确答案:D
-
第14题:
由凹圆弧R和凸圆弧R及平面组成的成型工件,当用轨迹法磨削时,通常应先磨削()。
- A、平面
- B、凸圆弧
- C、凹圆弧
- D、任意
正确答案:C -
第15题:
MIDPOINT,采用此方法可于一个元体的中间点处定义一点,对于圆弧来讲,中间点是在()上。
- A、圆心
- B、圆弧
- C、圆弧半径
- D、任意
正确答案:B -
第16题:
数控的大多数的轮廓控制仅限于实现()和圆弧形的轨迹运动。
正确答案:直线 -
第17题:
圆弧加工指令G02/G03中I、J、K值用于指定()。
- A、圆弧终点坐标
- B、圆弧起点坐标
- C、圆心的位置
- D、圆弧起点到圆弧圆心的矢量坐标
正确答案:D -
第18题:
G02G91X0Y0I0K10表示()运动轨迹.
- A、不运动
- B、圆
- C、一段圆弧
正确答案:B -
第19题:
锉削内圆弧面时,锉刀要完成的动作是()。
- A、前进运动和锉刀绕工件圆弧中心的转动
- B、前进运动和随圆弧面向左或向右移动
- C、前进运动和绕锉刀中心线转动
- D、前进运动、随圆弧面向左或向右移动和绕锉刀中心线转动
正确答案:D -
第20题:
程序段 G02 X50Y-20 I28 J5 F0.3 中 I28 J5 表示()。
- A、圆弧的始点
- B、圆弧的终点
- C、圆弧的圆心相对圆弧起点坐标
- D、圆弧的半径
正确答案:C -
第21题:
从理论上讲,数控机床刀具的运动轨迹是()
- A、直线
- B、圆弧
- C、折线
- D、曲线
正确答案:C -
第22题:
当用半径R指定()位置时,在同一半径R的情况下,从圆弧的起点到终点有两个圆弧的可能性。
- A、圆弧
- B、曲面
- C、圆心
- D、内径
正确答案:C -
第23题:
单选题从理论上讲,数控机床刀具的运动轨迹是()A直线
B圆弧
C折线
D曲线
正确答案: C解析: 暂无解析 -
第24题:
单选题所谓中间圆弧是()。A画在两条已知圆弧中间的圆弧
B画在两条未知圆弧中间的圆弧
C三个定形(半径)定位(圆心位置)尺寸知道两个的圆弧
D三个定位尺寸知道一个的圆弧
正确答案: B解析: 暂无解析