
Encoder Type 0/1编码器种类,根据合同参数设定,0为增量式
题目
Encoder Type 0/1编码器种类,根据合同参数设定,0为增量式
相似考题
更多“Encoder Type 0/1编码器种类,根据合同参数设定,0为增量式”相关问题
-
第1题:
如图所示,优先权编码器74148有8条输入线0~7,3条输出线A0~A2。当GS为0时编码器输出有效,E1为0时允许模块工作。请问当输入线6为0,其余输入线为1时,则输出A2、A1、A0的状态分别为( )。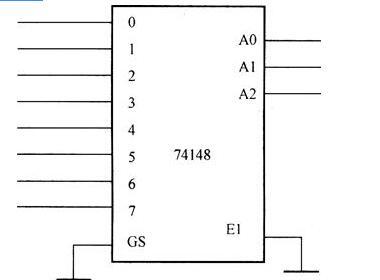 A.0、1、0
A.0、1、0
B.0、0、1
C.1、1、0
D.1、0、1答案:B解析:题中要求编码的十进制数为6,它的二进制表达式为110,但74148输出的是二进制反码,因此A2A1A0=001。 -
第2题:
一定量的气体做绝热自由膨胀,设其内能增量为△E,熵增量为△S,则有()。
A△E<0,△S=0
B△E<0,△S>0
C△E=0,△S>0
D△E=0,△S=0答案:C解析:绝热自由膨胀过程,△E=0,不可逆,熵增加。 -
第3题:
LWB2称重板, GDCB的M2-3-1参数Load Weigh Type设为1。GECB的M-1-3-1-1参数LW-TYP设为0()。
正确答案:正确 -
第4题:
摩托罗拉BSS/RXCDR参数中,“bsc_type”的参数取值范围是()
- A、无Abis,类型0
- B、无Abis,类型1
- C、无Abis,类型2
- D、有Abis,类型0
正确答案:A,B,C,D -
第5题:
FANUC系统中,设定或修改参数后,将“parameter write=”设为“0”,以禁止参数设定及修改。
正确答案:正确 -
第6题:
关于年金(复利)终值函数FV(rate,nper,pmt,pv,type)计算的说法错误的是()
- A、在pmt=0,而pv不为0时,函数值为复利终值。
- B、在pv为0或省略,pmt不为0,type不为0时,函数值为普通年金终值。
- C、在pv为0或省略,pmt不为0,type=1时,函数值为预付年金终值。
- D、在pmt,pv均不为0,type=0时,函数值为普通年金终值和复利终值的复合计算。
正确答案:B -
第7题:
光电编码器按其检测原理分为电磁式编码器、光电式编码器和()
- A、旋转式编码器
- B、绝对式编码器
- C、增量式编码式
- D、接触式编码器
正确答案:D -
第8题:
旋转式编码器按结构分为绝对型旋转式编码器和增量型旋转式编码器。
正确答案:正确 -
第9题:
简述绝对式编码器和增量式编码器的区别。
正确答案:(1)绝对式编码器:编码器输出的位置数据是唯一的;编码器的抗干扰特性、数据的可靠性大大提高了;使用寿命长,可靠性高,其精度和分辨率取决于光码盘的精度和分辨率。
(2)增量式编码器:编码器每转动一个预先设定的角度将输出一个脉冲信号,通过统计脉冲信号的数量来计算旋转的角度,因此编码器输出的位置数据是相对的;由于采用固定脉冲信号,因此旋转角度的起始位可以任意设定;由于采用相对编码,因此掉电后旋转角度数据会丢失,需要重新复位。 -
第10题:
多选题摩托罗拉BSS/RXCDR参数中,“bsc_type”的参数取值范围是()A无Abis,类型0
B无Abis,类型1
C无Abis,类型2
D有Abis,类型0
正确答案: C,A解析: 暂无解析 -
第11题:
单选题关于年金(复利)终值函数FV(rate,nper,pmt,pv,type)计算的说法错误的是()A在pmt=0,而pv不为0时,函数值为复利终值。
B在pv为0或省略,pmt不为0,type不为0时,函数值为普通年金终值。
C在pv为0或省略,pmt不为0,type=1时,函数值为预付年金终值。
D在pmt,pv均不为0,type=0时,函数值为普通年金终值和复利终值的复合计算。
正确答案: C解析: 暂无解析 -
第12题:
单选题在设定拉耳间隙为0.5mm时,角度编码器的显示值为()。A160
B0
C200
正确答案: B解析: 暂无解析 -
第13题:
 A.[SWITCHA] INTERFACE GIGABITETHERNET 1/0/3
A.[SWITCHA] INTERFACE GIGABITETHERNET 1/0/3
[SWITCHA-GIGABITETHERNET1/0/3] PORT LINK-TYPE TRUNK
[SWITCHA-GIGABITETHERNET1/0/3] PORT TRUNK ALLOW-PASS VLAN 2 3 B.[SWITCHA] INTERFACE GIGABITETHERNET 1/0/1
[SWITCHA-GIGABITETHERNET1/0/3] PORT LINK-TYPE TRUNK
[SWITCHA-GIGABITETHERNET1/0/3] PORT TRUNK ALLOW-PASS VLAN 2 3 C.[SWITCHA] INTERFACE GIGABITETHERNET 1/0/1
[SWITCHA-GIGABITETHERNET1/0/3] PORT LINK-TYPE ACCESS
[SWITCHA-GIGABITETHERNET1/0/3] PORT DEFAULT VLAN 2 3 D.[SWITCHA] INTERFACE GIGABITETHERNET 1/0/3
[SWITCHA-GIGABITETHERNET1/0/3] PORT LINK-TYPE ACCESS
[SWITCHA-GIGABITETHERNET1/0/3] PORT DEFAULT VLAN 2 3答案:A解析:试题分析:
要实现上图中跨交换机的Vlan之间的通信,需要配置SwitchA和SwitchB之间的链路类型及通过的VLAN,实现相同业务用户通过SwitchA和SwitchB通信。
[SwitchA] interface gigabitethernet 1/0/3
[SwitchA-GigabitEthernet1/0/3] port link-type trunk //交换机之间相连接口类型建议使用trunk,接口
默认类型不是trunk,需要手动配置为trunk
[SwitchA-GigabitEthernet1/0/3] port trunk allow-pass vlan 2 3 //将接口GE1/0/3加入VLAN 2和VLAN 3 -
第14题:
一定量的气体做绝热自由膨胀,设其内能增量为△E,熵增量为△S,则有( )。A.△E<0,△S=0
B.△E<0,△S>0
C.△E=0,△S>0
D.△E=0,△S=0答案:C解析:绝热自由膨胀过程,△E=0,不可逆,熵增加。 -
第15题:
如图12-1所示,优先权编码器74148有8条输入线0~7,3条输出线A0~A2。当GS为0时编码器输出有效,E1为0时允许模块工作。请问当输入线6为0,其余输入线为1时,则输出A2、A1、A0的状态分别为()。
- A、0、1、0
- B、0、0、1
- C、1、1、0
- D、1、0、1
正确答案:C -
第16题:
What is also called Type 0 authentication in OSPF on Cisco Routers?()
- A、MD5
- B、There is no Type 0 authentication
- C、SHA1
- D、Null
正确答案:D -
第17题:
根据C-D函数的设定,总产量达到最大值时边际产量的取值为()
- A、小于1
- B、大于0
- C、小于0
- D、等于0
正确答案:D -
第18题:
光电编码器按其结构形式分为直线式编码器和()
- A、旋转式编码器
- B、绝对式编码器
- C、增量式编码式
- D、电磁式编码器
正确答案:A -
第19题:
变桨系统中用旋转编码器来进行桨距角的检测,旋转编码器是()旋转编码器。
- A、增量式
- B、绝对式
- C、增量、旋转一体式
正确答案:A -
第20题:
增量式光电编码器由于采用固定脉冲信号,因此旋转角度的起始位置()。
- A、是出厂时设定的
- B、可以任意设定
- C、使用前设定后不能变
- D、固定在码盘上
正确答案:B -
第21题:
单选题变桨系统中用旋转编码器来进行桨距角的检测。旋转编码器是()旋转编码器.A增量式
B绝对式
C增量、旋转一体式
正确答案: A解析: 暂无解析 -
第22题:
填空题脉冲编码器有二种类型:增量式和()式。正确答案: 绝对解析: 暂无解析 -
第23题:
问答题简述绝对式编码器和增量式编码器的区别。正确答案: (1)绝对式编码器:编码器输出的位置数据是唯一的;编码器的抗干扰特性、数据的可靠性大大提高了;使用寿命长,可靠性高,其精度和分辨率取决于光码盘的精度和分辨率。
(2)增量式编码器:编码器每转动一个预先设定的角度将输出一个脉冲信号,通过统计脉冲信号的数量来计算旋转的角度,因此编码器输出的位置数据是相对的;由于采用固定脉冲信号,因此旋转角度的起始位可以任意设定;由于采用相对编码,因此掉电后旋转角度数据会丢失,需要重新复位。解析: 暂无解析