
消除MOTN-023报警,需要将J5轴在关节坐标系下开出0°附近范围。
题目
消除MOTN-023报警,需要将J5轴在关节坐标系下开出0°附近范围。
相似考题
更多“消除MOTN-023报警,需要将J5轴在关节坐标系下开出0°附近范围。”相关问题
-
第1题:
在矢量控制中以定子A轴为参考轴的坐标系是dq坐标系。()此题为判断题(对,错)。
正确答案:错误
-
第2题:
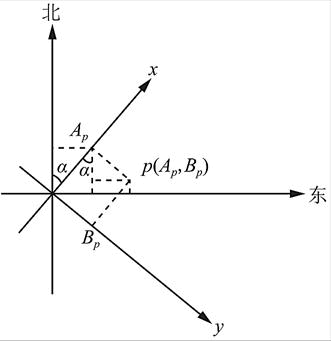
设A、B坐标系为施工坐标系,A轴在测量坐标系中的方位角为α,施工坐标系的原点为O′,其坐标为x0和y0,下列何项表达了点p的施工坐标Ap、Bp转换为测量坐标xp、yp的公式( )。
 答案:A解析:一般以纵轴为x,横轴为y,方位角则是以坐标纵轴北方向为起始,顺时针量到直线的水平角,如题11解图所示,xp-x0=Apcosα-Bpsinα,yp-y0=Apsinα+Bpcosα。
答案:A解析:一般以纵轴为x,横轴为y,方位角则是以坐标纵轴北方向为起始,顺时针量到直线的水平角,如题11解图所示,xp-x0=Apcosα-Bpsinα,yp-y0=Apsinα+Bpcosα。
-
第3题:
SRVO—075WARN Pulse not established(Group:i Axis:j)报警发生,只能在关节坐标系下单关节操作机器人。
正确答案:正确 -
第4题:
MOTN-023报警表示J5轴处于0°附近。
正确答案:正确 -
第5题:
三轴陀螺稳定平台的平台坐标系,在稳定系统的作用下,保持()。
- A、和机体坐标系一致
- B、和水平面平行
- C、和地理坐标系一
- D、相对惯性空间保持稳定
正确答案:D -
第6题:
机器人在关节坐标系下完成的动作,无法在直角坐标系下实现。
正确答案:错误 -
第7题:
TAH206测量范围为0~150℃,高报警值为80℃,报警返回值1%,当高报警后,温度降到78℃时,报警信号消除了吗?为什么?
正确答案: 消除了。因为报警返回值=1%=1.5℃,当温度低于80-1.5=78.5℃时,报警信号就能消除。 -
第8题:
下列关于建筑坐标系的描述,正确的是()
- A、建筑坐标系的坐标轴通常与建筑物主轴线方向一致
- B、建筑坐标系的坐标原点应设置在总平面图的东南角上
- C、建筑坐标系的纵坐标轴通常用A表示,横坐标轴通常用B表示
- D、建筑坐标系的纵坐标轴通常用B表示,横坐标轴通常用A表示
- E、测设前需进行建筑坐标系统与测量坐标系统的变换
正确答案:A,C,E -
第9题:
在()和()的影响下,瞬时天球坐标系的坐标轴指向是在不断地旋转。
正确答案:岁差;章动 -
第10题:
多选题下列关于建筑坐标系的描述,正确的是()A建筑坐标系的坐标轴通常与建筑物主轴线方向一致
B建筑坐标系的坐标原点应设置在总平面图的东南角上
C建筑坐标系的纵坐标轴通常用A表示,横坐标轴通常用B表示
D建筑坐标系的纵坐标轴通常用B表示,横坐标轴通常用A表示
E测设前需进行建筑坐标系统与测量坐标系统的变换
正确答案: C,B解析: 暂无解析 -
第11题:
判断题在四轴坐标系统中,表示水平轴方向的三个晶面指数代数和为0A对
B错
正确答案: 对解析: 暂无解析 -
第12题:
填空题在()和()的影响下,瞬时天球坐标系的坐标轴指向是在不断地旋转。正确答案: 岁差,章动解析: 暂无解析 -
第13题:
Lovett徒手肌力评定的分级标准不正确的是
A、0级:无可见或可感觉到的肌肉收缩
B、1级:有肌肉收缩但无关节活动
C、2级:消除重力的体位下,能做全关节活动范围的运动
D、3级:抗重力的体位下,能做全关节活动范围的运动;且能抗部分阻力
E、3级:抗重力的体位下,能做全关节话动范围的运动;但不能抗阻力
参考答案:D
-
第14题:

x轴旋转一周,所成旋转曲面记作S。
(1)在空间直角坐标系下,写出曲面S的方程;
(2)求曲面S与平面x=0所围成立体的体积。答案:解析:
-
第15题:
机载激光雷达测量系统在检校的目的主要是消除激光扫描仪坐标系与IMU坐标系坐标轴不平行(安置角误差)引起点云数据的坐标偏移误差。
正确答案:正确 -
第16题:
进行单轴核对方式进行零点复归时,以下做法正确的是()
- A、只需将该轴示教到0度
- B、将该轴示教到0度(做轴三零点时,需将轴二示教到零度)
- C、将所有轴都示教到零度
- D、消除SRVO-062/075报警
正确答案:B,D -
第17题:
对程序段G68X10Y0R45;描述不正确的有()(FANUC系统)。
- A、G68是坐标旋转指令
- B、X10Y0是坐标旋转的中心
- C、坐标系逆时针旋转45度
- D、坐标系在X轴方向偏移10mm再旋转
- E、坐标系顺时针旋转45度
正确答案:D,E -
第18题:
机器人的奇异点会发生在J5轴接近0度的时候。
正确答案:正确 -
第19题:
下列关于建筑坐标系,说法正确的是()
- A、建筑坐标系的坐标轴通常与建筑物主轴线方向一致
- B、建筑坐标系的坐标原点通常设置在总平面图的东南角上
- C、建筑坐标系的坐标轴通常用A、B分别表示坐标纵轴、横轴
- D、对于前后、左右对称的建筑物,坐标原点可选在对称中心
- E、测设前需进行建筑坐标系统与测量坐标系统的变换
正确答案:A,C,D,E -
第20题:
在四轴坐标系统中,表示水平轴方向的三个晶面指数代数和为0
正确答案:正确 -
第21题:
下面关于直角坐标系不正确的是()。
- A、x,y,z轴相互垂直
- B、直角坐标系包括三个平面
- C、中心点0点为x,y,z轴相交点
- D、中心点0点不属于任何一个平面
正确答案:D -
第22题:
单选题数控车床有X、Z两轴联动,其设定的工件坐标系的方向应()。AX轴与机床坐标系相反
BZ轴与机床坐标系相反
CX、Z轴与机床坐标系都相反
DX、Z轴与机床坐标系都相同
正确答案: B解析: 暂无解析 -
第23题:
判断题机载激光雷达测量系统在检校的目的主要是消除激光扫描仪坐标系与IMU坐标系坐标轴不平行(安置角误差)引起点云数据的坐标偏移误差。A对
B错
正确答案: 错解析: 暂无解析