
闭环控制系统开环增益愈高,则()。A、系统跟随误差小B、系统超调量小C、系统稳定性好D、系统稳态误差小
题目
闭环控制系统开环增益愈高,则()。
- A、系统跟随误差小
- B、系统超调量小
- C、系统稳定性好
- D、系统稳态误差小
相似考题
更多“闭环控制系统开环增益愈高,则()。A、系统跟随误差小B、系统超调量小C、系统稳定性好D、系统稳态误差小”相关问题
-
第1题:
系统类型、开环增益对系统稳态误差的影响为()
A.系统型次越高,开环增益K越大,系统稳态误差越小
B.系统型次越低,开环增益K越大,系统稳态误差越小
C.系统型次越高,开环增益K越小,系统稳态误差越小
D.系统型次越低,开环增益K越小,系统稳态误差越小
参考答案:BCD
-
第2题:
关于线性系统稳态误差,正确的说法是:( )A 、一型系统在跟踪斜坡输入信号时无误差 ;
B 、稳态误差计算的通用公式是20()lim 1()()ss s s R s e G s H s →=+;
C 、增大系统开环增益K 可以减小稳态误差;
D 、增加积分环节可以消除稳态误差,而且不会影响系统稳定性。
参考答案C
-
第3题:
减小闭环控制系统稳态误差的方法有( )。
A. 提高开环增益
B. 降低开环增益
C. 增加微分环节和降低开环增益
D. 减少微分环节和降低开环增益答案:A解析:稳定的控制系统在输入变量的作用下,动态过程结束后,进入稳定状态的误差,称为稳态误差ess。稳态误差ess的公式为: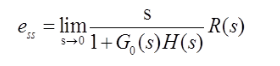
开环传递函数G0(s)H(s)表示为: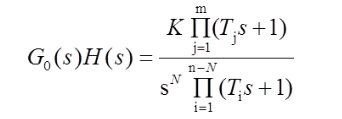
式中,K为系统的开环放大系数或开环增益;N表示开环传递函数所包含的积分环节数。则提高开环增益,增加积分环节数目,可以减小稳态误差。 -
第4题:
系统的稳态误差与系统开环传递函数的增益、()和()有关。
正确答案:型次;阶次 -
第5题:
关于线性系统稳态误差,正确的说法是()。
- A、增加系统前向通道中的积分环节个数可以提高系统的无稳态误差的等级
- B、减小系统开环增益K可以减小稳态误差
- C、增加积分环节可以消除稳态误差,而且不会影响系统稳定性
正确答案:A -
第6题:
闭环控制系统比开环控制系统及半闭环控制系统()。
- A、稳定性好
- B、故障率低
- C、精度低
- D、精度高
正确答案:D -
第7题:
系统的开环增益K增大,则一般系统()。
- A、稳定性改善
- B、稳定性变差
- C、稳态误差增大
- D、稳态误差减小
- E、快速性变差
- F、快速性变好
正确答案:B,D,F -
第8题:
增大系统的开环增益,将使系统跟随稳态误差()。
- A、变大
- B、变小
- C、不变
- D、不能确定
正确答案:B -
第9题:
含有扰动顺馈补偿的复合控制系统可以显著减小()
- A、超调量
- B、开环增益
- C、扰动误差
- D、累计误差
正确答案:C -
第10题:
单选题对于单位阶跃输入,下列说法不正确的是( )。[2011年真题]A只有0型系统有稳态误差,其大小与系统的开环增益成反比
B只有0型系统有稳态误差,其大小与系统的开环增益成正比
CⅠ型系统位置误差系数为无穷大时,稳态误差为0
DⅡ型及以上系统与Ⅰ型系统一样
正确答案: C解析:
AB两项,对于单位阶跃输入,0型系统的位置误差系数Kp=K,稳态误差ess=1/(1+Kp)=1/(1+K)。因此,0型系统在单位阶跃输入下是有稳态误差的,其大小与系统的开环增益K成反比。CD两项,对于单位阶跃输入,Ⅰ型系统及Ⅰ型以上的系统的位置误差系数Kp=∞,稳态误差ess=1/(1+Kp)=0。 -
第11题:
单选题闭环控制系统比开环控制系统及半闭环控制系统()A稳定性好
B精度高
C故障率低
D价格低
正确答案: D解析: 暂无解析 -
第12题:
单选题在改变给定值的控制系统中,若动态过程超调量太大,则说明系统的()。A稳定性好
B稳定性差
C动态精度高
D稳态偏差大
正确答案: C解析: 暂无解析 -
第13题:
适当的提高系统的开环增益可以减小稳态误差。()
正确答案:对
-
第14题:
控制系统的超调量与下列哪个因素有关? ( )A 稳态误差;
B 稳定性;
C 系统阻尼;
D 开环增益。
参考答案C
-
第15题:
对于单位阶跃输入,下列说法不正确的是()。A.只有0型系统具有稳态误差,其大小与系统的开环增益成反比
B.只有0型系统具有稳态误差,其大小与系统的开环增益成正比
C.Ⅰ型系统位置误差系数为无穷大时,稳态误差为0
D.Ⅱ型及以上系统与Ⅰ型系统一样答案:B解析: -
第16题:
闭环控制系统比开环及半闭环系统()。
- A、稳定性好
- B、精度高
- C、故障率低
正确答案:B -
第17题:
闭环控制系统比开环及半闭环系统()。
- A、精度高
- B、稳定性好
- C、故障率低
- D、效率高
正确答案:A -
第18题:
已知单位负反馈闭环控制系统的单位阶跃响应的稳态误差为0.1,试问该系统为几型系统,系统的开环放大系数为多少?
正确答案: 1)零型系统;2)0.1=1/(1+K)K=9 -
第19题:
稳态误差的大小与系统的开环增益有关,系统的开环增益越大,稳态误差越大。
正确答案:错误 -
第20题:
对于一个有稳态误差的系统,增大系统增益则稳态误差将()。
正确答案:减小 -
第21题:
单选题若控制系统的静态偏差小,则说明系统的()。A稳定性好
B稳态精度高
C稳定性差
D稳态精度低
正确答案: A解析: 暂无解析 -
第22题:
单选题如果某一自动控制系统静态偏差小,则()。A稳定性好
B稳定性差
C稳态精度高
D稳态精度低
正确答案: B解析: 暂无解析 -
第23题:
单选题含有扰动顺馈补偿的复合控制系统可以显著减小()A超调量
B开环增益
C扰动误差
D累计误差
正确答案: D解析: 暂无解析
