
1、工业机器人单轴运动利用()来实现A.示教器B.控制柜C.示教器操纵杆D.按键
题目
1、工业机器人单轴运动利用()来实现
A.示教器
B.控制柜
C.示教器操纵杆
D.按键
相似考题
参考答案和解析
更多“1、工业机器人单轴运动利用()来实现”相关问题
-
第1题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.
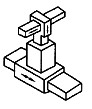
B.
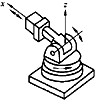
C.

D.
 正确答案:B
正确答案:B
解析:本题考核要点是工业机器人的分类。要求依据给定的图示进行简单判别。球坐标式(代号RRP)又称极坐标式,机器人手臂的运动由一个直线运动和两个转动组成。 -
第2题:
对于6轴工业机器人,( )关节的转动主要实现姿态的改变。A.1,2,3轴
B.2,3,4轴
C.3,4,5轴
D.4,5,6轴
参考答案:D
-
第3题:
机器人零点丢失后会有什么后果( )。A.仅能单轴运行
B.仅能在规定路径上运行
C.仅能用专用装置驱动
D.机器人不能运动
参考答案:A
-
第4题:
工业机器人单轴额定速度测试方法,是在额定负载下,使被测( )进入稳定工作状态。A.关节
B.范围
C.方向
D.手臂
参考答案:A
-
第5题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。
A.3
B.4
C.5
D.6
正确答案:A
-
第6题:
ROMAT工业机器人由六个自由度组合而成,三个定位自由度1~3轴和三个角度定向自由度4~6轴,此外,机器人系统还装备了大量的用来移动机器人或者工件的附加轴,这些轴被称为()7~12轴。
正确答案:外部轴 -
第7题:
机器人机器人零点复位的常用方法有哪些?()
- A、6轴零点复位法
- B、单轴零点复位法
- C、双轴零点复位法
- D、有MASTER数据备
正确答案:A,B,D -
第8题:
P500机器人在任何位置都能实现单台机器人旁路。
正确答案:错误 -
第9题:
六关节机器人的第六轴运动范围为-360°~+360°。
正确答案:正确 -
第10题:
机器人的自由度数目就是机器人所具有独立坐标轴运动的数目。
正确答案:正确 -
第11题:
在工业机器人中,利用()传感器检测指部与操作物体在切向的相对位移,从而实现实时控制指部的夹紧力。
正确答案:滑动觉 -
第12题:
填空题在工业机器人中,利用()传感器检测指部与操作物体在切向的相对位移,从而实现实时控制指部的夹紧力。正确答案: 滑动觉解析: 暂无解析 -
第13题:
对于未安装工具的工业机器人,( )关节的转动无法确定其空间位置。A.7轴
B.6轴
C.5轴
D.4轴
参考答案:B
-
第14题:
六轴工业机器人靠近机器人底座的轴通常定义为( )。A.0轴
B.1轴
C.6轴
D.附加轴
参考答案:B
-
第15题:
手动示教机器人需要移动位置时,通常选择( )。A.单轴运动
B.线性运动
C.重定位运动
D.旋转运动
参考答案:B
-
第16题:
在直角坐标系下,机器人各轴可实现单独正向或反向运动。( )此题为判断题(对,错)。
参考答案:错
-
第17题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。 A.3B.4C.5 D.6
正确答案:A
-
第18题:
机器人轨迹泛指工业机器人在运动过程中所走过的路径。
正确答案:错误 -
第19题:
机器人的主要参数有()
- A、手部负重
- B、运动轴数
- C、运动范围
- D、安装方式
正确答案:A,B,C,D -
第20题:
机器人的运动速度其实是指()的运动速度
- A、J6轴法兰的中心点
- B、工具中心点
- C、机器人各轴
- D、机器人电机
正确答案:B -
第21题:
机器人已添加外部轴,当机器人自身轴运动指令和外部轴运动指令相邻时,机器人自身轴和外部轴不会同时动作。
正确答案:错误 -
第22题:
六关节机器人的第三轴上仰运动为正方向。
正确答案:错误 -
第23题:
研究工业机器人机构运动学的目的是什么?
正确答案:研究工业机器人机构运动学的目的是建立工业机器人各运动构件与手部在空间的位置之间的关系,建立工业机器人手臂运动的数学模型,为控制工业机器人的运动提供分析的方法和手段,为仿真研究手臂的运动特性和设计控制器实现预定的功能提供依据。 -
第24题:
填空题工业机器人额定速度是指工业机器人在额定负载、匀速运动过程中,机械接口中心的()。正确答案: 最大速度解析: 暂无解析