
关于r-环路理论,下列说法错误的是()。A、肌梭的传入纤维有两类:Ⅰa类纤维(快传纤维)进入脊髓后直接与支配本肌肉或协同肌的a神经元发生兴奋性突触联系B、脊髓后角的r神经元发出的纤维支配梭内肌纤维,调节梭内肌节的力度C、脊髓前角的r神经元发出的纤维支配梭内肌纤维,调节梭内肌纤维的长度D、这种r神经元的活动,通过肌梭传入联系,引起a神经元的活动和肌肉收缩的反射过程称r-环路
题目
A、肌梭的传入纤维有两类:Ⅰa类纤维(快传纤维)进入脊髓后直接与支配本肌肉或协同肌的a神经元发生兴奋性突触联系
B、脊髓后角的r神经元发出的纤维支配梭内肌纤维,调节梭内肌节的力度
C、脊髓前角的r神经元发出的纤维支配梭内肌纤维,调节梭内肌纤维的长度
D、这种r神经元的活动,通过肌梭传入联系,引起a神经元的活动和肌肉收缩的反射过程称r-环路
相似考题
更多“关于r-环路理论,下列说法错误的是()。 ”相关问题
-
第1题:
有以下结构体说明和变量定义,如图所示,指针p、q、r分别指向一个链表中的三个连续结点。 struct node { int data; struct node*next; }*p,*q,*r;
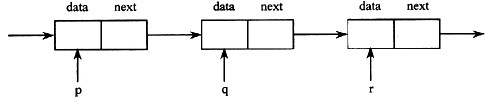
现要将q和r所指结点的先后位置交换,同时要保持链表的连续,以下错误的程序段是 ______。
A.q->next=r->next;r->next=q;p->next=r;
B.q->next=r->next;p->next=r;r->next=q;
C.p->next=r;q->next=r->next;r->next=q;
D.r->next=q;q->next=r->next;p->next=r;
正确答案:D
-
第2题:
下面关于路由环路的说法中,正确的是().A.路由环路使报文不能正确到目的地,并引起链路拥塞
B.路由环路只能通过动态路由协议产生
C.报文在两个或几个路由器之间循环路由,直到TTL减为0而丢弃
D.链路状态协议不会产生路由环路
参考答案:A, C
-
第3题:
下列说法错误的是()
A.电场的安培环路定理揭示了电场力是保守力
B.磁场的安培环路定理揭示了磁场力是保守力
C.磁场的高斯定理揭示了磁场的涡旋性
D.毕奥-沙法尔定律是描述磁场对通电导体作用力大小和方向的规律
感生电场是有源场 -
第4题:
有以下结构体说明和变量定义,如下图所示,指针p、q、r分别指向一个链表中的3个连续结点。 struct node { int data; struct node *next; } *p,*q,*r;
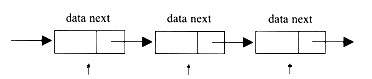
现要将q和r所指结点的先后位置交换,同时要保持链表的连续,以下错误的程序段是( )。
A.r->next=q;q->next=r->next;p->next=r;
B.q->next=r->neaxt;p->next=r;r->next=q;
C.p->next=r;q->next=r->next;r->next=q;
D.q->next=r->next;r->next=q;p->next=r;
正确答案:A
解析:题目中要求将q和r所指结点的先后位置交换,即要求p所指结点的指针域指向r所指向的结点,r所指向结点的指针域指向q所指向的结点,q所指向结点的指针域指向r所指向的结点。选项A首先让r所指向指针的指针域指向q所指向的结点,这样就将r所指向结点的指针域指向的结点丢失了,故选项A错误。选项B首先让q所指向结点的指针域指向r所指向结点的指针域所指向的结点,然后,让p所指向结点的指针域指向r所指向的结点,最后让r所指向结点的指针域指向q所指向的结点,满足要求,故选项B正确。选项C首先让p所指向结点的指针域指向r所指向的结点,然后让q所指向结点的指针域指向r所指向结点的指针域所指向的结点,最后让r所指向结点的指针域指向q所指向的结点,满足要求,故选项C正确。选项D首先让q所指向结点的指针域指向r所指向结点的指针域所指向的结点,然后,让r所指向结点的指针域指向q所指向的结点,最后让p所指向结点的指针域指向r所指向的结点,满足要求,故选项D正确。所以,4个选项中选项A符合题意。 -
第5题:
下列关于概化理论的表述,错误的是A.属于随机抽样理论
B.关于行为测量可靠性的理论
C.关于被试能力估计的理论
D.全域分数类似经典测量理论的真分数答案:C解析:应用项目反应理论可对被试的能力进行估计,概化理论主要解决的是测验过程中误差来源的问题。