
冗余约束(虚约束)在计算机构自由度时应除去不计,所以冗余约束在机构系统中没有存在的价值。
题目
冗余约束(虚约束)在计算机构自由度时应除去不计,所以冗余约束在机构系统中没有存在的价值。
相似考题
更多“冗余约束(虚约束)在计算机构自由度时应除去不计,所以冗余约束在机构系统中没有存在的价值。”相关问题
-
第1题:
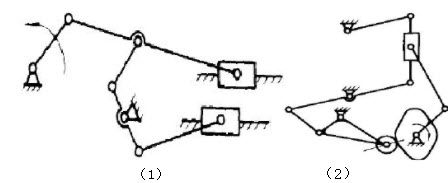
计算下列机构的自由度,若有虚约束、复合铰链和局部自由度,需指出。

略 -
第2题:
计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出。

F处为复合铰链,H(或I) 处为虚约束,则
略 -
第3题:
计算下列机构的自由度,并指出存在的复合铰链、虚约束或局部自由度。
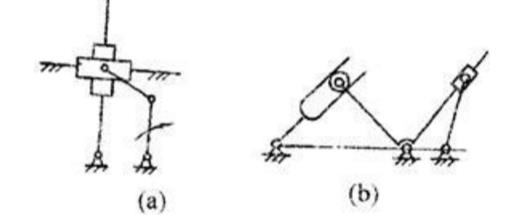
(a)
a中存在复合铰链,5个构件组成复合铰链,共有4个低副。
(b)
b中滚子为局部自由度。
略 -
第4题:
在机构中采用虚约束的目的是为了改善机构的()和()。
正确答案:工作情况;受力情况 -
第5题:
在计算机构自由度时可不考虑虚约束。
正确答案:错误 -
第6题:
由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束
正确答案:错误 -
第7题:
平面机构中若引入一个高副将带入()个约束,而引入一个低副将带入()个约束。平面机构中约束数与自由度数的关系是_约束数+自由度数=3。
正确答案:1;2 -
第8题:
计算平面机构自由度的公式为,应用此公式时应注意判断:(A)(),(B)局部自由度,(C)虚约束。
正确答案:复合铰链 -
第9题:
在平面机构中若引入PH个高副将引入()个约束,而引入PL个低副将引入()个约束,则活动构件数n、约束数与机构自由度F的关系是()。
正确答案:PH;2PL;F=3n-2PL-PH -
第10题:
何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?
正确答案: 复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中, 其某些构件所能产生的局部运动并不影响其他构件的运动, 我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时, K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。 -
第11题:
判断题虚约束是在机构中存在的多余约束,计算机构自由度时应除去。A对
B错
正确答案: 对解析: 暂无解析 -
第12题:
单选题在计算平面机构中自由度时,如果两个以上的构件汇交在一处构成回转副时,则会带来()。A虚约束
B局部自由度
C复合铰链
D视具体情况而定
正确答案: A解析: 暂无解析 -
第13题:
简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。

机构具有确定相对运动的条件是机构的自由度数目等于机构中原动件的数目。
即W=F>0。
机构中,n=9,pL=12,pH=1
F=3n-2pL-pH=2=W>0,所以机构运动确定。
C处复合铰链,E处虚约束,F处局部自由度。
略 -
第14题:
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。

F.3n-2PL-PH=3×6-2×8-1=1
F处为虚约束;B处为复合铰链;G处为局部自由度。
机构运动确定。
略 -
第15题:
在计算平面机构中自由度时,如果两个以上的构件汇交在一处构成回转副时,则会带来()。
A虚约束
B局部自由度
C复合铰链
D视具体情况而定
C
略 -
第16题:
计算机构自由度时,若计入虚约束,则机构自由度就会()
- A、增多
- B、减少
- C、不变
正确答案:B -
第17题:
虚约束是在机构中存在的多余约束,计算机构自由度时应除去。
正确答案:正确 -
第18题:
在机构中,某些不影响机构运动传递的重复部分所带入的约束为()。
- A、虚约束
- B、局部自由度
- C、复合铰链
正确答案:A -
第19题:
计算机构自由度时,若计入虚约束,则机构的自由度就会()。
- A、增多;
- B、减少;
- C、不变。
正确答案:B -
第20题:
在平面机构中若引入PH个高副将引入PH个约束,而引入PL个低副将引入()个约束,则活动构件数n、约束数与机构自由度F的关系是F=()
正确答案:2PL;3n-2PL-H -
第21题:
机构中的复合铰链是指();局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
正确答案:由三个或三个以上构件组成同一回转轴线的转动副 -
第22题:
单选题在计算机构的自由度应除去不计()A局部自由度
B虚约束
C二者都除去
正确答案: B解析: 暂无解析 -
第23题:
单选题在机构中,某些不影响机构运动传递的重复部分所带入的约束为()A虚约束
B局部自由度
C复合铰链
D真约束
正确答案: D解析: 暂无解析 -
第24题:
判断题如果组件全部自由度被限制,则称完全约束,在图形窗口中看不到约束符号。如果组件有几个自由度没有被限制,则称为欠约束。在装配中,允许欠约束存在。A对
B错
正确答案: 错解析: 暂无解析








