
20 A Gantt chart is useful in determining:A. the level of effort for a taskB when a task starts and stopsC. how tasks are related to each otherD. who is assigned to do a taskE. All of the above
题目
20 A Gantt chart is useful in determining:
A. the level of effort for a task
B when a task starts and stops
C. how tasks are related to each other
D. who is assigned to do a task
E. All of the above
相似考题
参考答案和解析
更多“20A Gantt chart is useful in determining: A.the level of effort for a task Bwhen a task st ”相关问题
-
第1题:
阅读以下说明和x86汇编语言代码,根据要求回答问题1至问题3。
【说明】
在某嵌入式安全监测系统中,对某任务的加工操作需通过数据采集(Collect_task)、计算(Calculate_task)这两个不同的程序段来完成,并且执行程序段Collect_task和Calculate _task的顺序及次数有如下约定:
Collect_task(2次)→Calculate_task(1次)→Collect_task(5次)→Calculate_task(4次)→Collect_task(2次)→Calculate_task(2次)
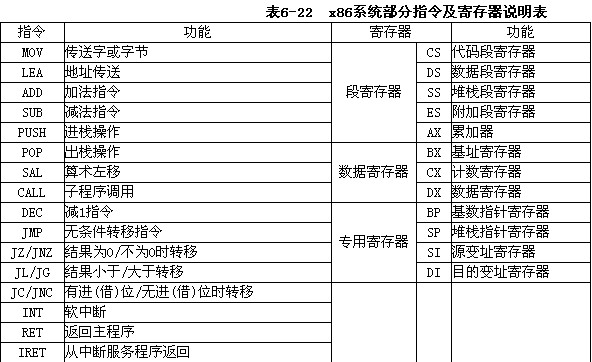
表6-22 所示为x86系统部分指令及寄存器说明。
采用逻辑尺控制法实现以上要求的汇编程序如下:
【汇编程序代码】
N EQU (1)
RULE EQU (2)
CODE SEGMENT
ASSUME CS:CODE
START: MOV AX,RULE
MOV CL,N
LOP: SAL AX,1
JC (3)
Collect: CALL Collect_task ;执行Collect_task程序段
JMP (4)
Calculate:CALL Calculate_task ;执行Calculate_task程序段
NEXT: (5)
JNZ (6)
MOV AH,4CH ;功能号送入AH寄存器
INT (7) ;结束程序运行,中断返回
(8)
END START
请根据试题的要求,将汇编程序代码中(1)~(8)空缺处的内容填写完整。
正确答案:(1)16或等价的二进制数“00010000B” (2)20F3H或等价的二进制数“0010000011110011B” (3)Calculate (4)NEXT (5)DEC CL (6)LOP (7)21H (8)CODE ENDS 这是一道要求读者利用逻辑尺控制法进行循环程序设计的程序分析题。本题的解答思路如下: ①在本案例的循环程序中循环体又内嵌有多个不同的分支结构。每执行循环体一次将根据事先规定好的标志位去执行具体的分支程序。试题要求采用逻辑尺控制法实现对于这种结构的循环程序设计。逻辑尺控制法首先应设计一把逻辑“尺”即用字节、字、双字甚至根据需要所设置的多字节中的各位表示不同的操作如果需在循环中执行更多分支也可采用多位组合。 ②题干中对执行程序段Collect_task和Calculate_task的顺序及次数做了如下约定: Collect_task(2次)→Calculate_task(1次)→Collect_task(5次)→Calculate_task(4次)→Collect_task(2次)→Calculate_task(2次) 由于程序只简单执行两种不同的程序段因此用一位“0”或“1”来分别标志转向执行两种不同的分支操作。执行程序段Collect_task和Calculate_task共有16次因此采用一个字(16位)来分别表示这两个程序段的执行顺序和次数。因此(1)空缺处可填人循环的总次数“16”或者是等价的二进制数“00010000B”。 根据以上分析结果可设计出相应的逻辑尺如图6-25所示。 图6-25中阴影部分是程序段Collect_task执行的顺序和次数其余是程序段 Calculate task执行的顺序和次数。注意执行“Collect_task(2次)”中第1次执行的 Collect_task任务是放置在逻辑尺的最高位还是放置在逻辑尺的最低位由程序段中算术左移操作语句“SAL AX1”决定。将图6-25所示的逻辑尺的参数定义转换成等价的十六进制数0010 0000 1111 0011B=20F3H。因此(2)空缺处可填入“20F3H”或者是等价的二进制数“0010000011110011B”。
③程序中已给出代码(CODE)段定义伪指令“CODE SEGMENT”由于段定义伪指令的格式是:
段名>SEGMENT[定位方式][连接方式工类别名]
段名>ENDS
因此在模块结束伪指令“END START”之前需安排一条“CODE ENDS”即(8)空缺处需填入CODE段定义结束伪指令一“CODE ENDS”。
④由于程序段中已给出“功能号送入AH寄存器”及“中断返回”等关键信息由此可判断(7)空缺处需填入某一个中断类型码。由于软中断类型码通常取20H~27H其中系统功能调用的通用格式是:
功能号送入AH寄存器
INT 21H
语句“MOV AH4CH”中“4CH”就是相应的功能号因此(7)空缺处需填入“21H”。
⑤结合逻辑尺控制算法的设计思想和试题中给出的指令及寄存器说明表仔细分析试题的程序段先填写(3)、(4)、(6)空缺处的标号内容最后完成(5)空缺处循环计数减1操作(DEC CL)的推理。以下给出该程序段的每条语句的详细解析。
N EQU 14 ;定义循环的总次数
RULE EQU 183CH ;定义逻辑尺
CODE SEGMENT ;CODE段定义伪指令
ASSUME CS:CODE ;段寄存器说明伪指令
START: MOV AXRULE ;AX←逻辑尺标志
MOV CLN ;CL←循环的总次数
LOP: SAL AX1 ;算术左移操作CF←逻辑尺最高位
JC Calculate ;当CF=1时转至Calculate标号处
Collect: CALL Collect_task ;当CF=0时执行Collect_task程序段
JMP NEXT ;无条件转至NEXT标号处
Calculate:CALL Calculate_task ;执行Calculate_task程序段
NEXT: DEC CL ;循环计数CL←CL—1
JNZ LOP ;若CL≠0转至LOP标号处继续循环
MOV AH4CH ;若CL=0结束程序运行返回
INT 21H ;系统功能调用
CODE ENDS ;CODE段定义结束伪指令
END START ;模块结束伪指令
图6-25中阴影部分是程序段Collect_task执行的顺序和次数其余是程序段 Calculate task执行的顺序和次数。注意执行“Collect_task(2次)”中第1次执行的 Collect_task任务是放置在逻辑尺的最高位还是放置在逻辑尺的最低位由程序段中算术左移操作语句“SAL AX1”决定。将图6-25所示的逻辑尺的参数定义转换成等价的十六进制数0010 0000 1111 0011B=20F3H。因此(2)空缺处可填入“20F3H”或者是等价的二进制数“0010000011110011B”。
③程序中已给出代码(CODE)段定义伪指令“CODE SEGMENT”由于段定义伪指令的格式是:
段名>SEGMENT[定位方式][连接方式工类别名]
段名>ENDS
因此在模块结束伪指令“END START”之前需安排一条“CODE ENDS”即(8)空缺处需填入CODE段定义结束伪指令一“CODE ENDS”。
④由于程序段中已给出“功能号送入AH寄存器”及“中断返回”等关键信息由此可判断(7)空缺处需填入某一个中断类型码。由于软中断类型码通常取20H~27H其中系统功能调用的通用格式是:
功能号送入AH寄存器
INT 21H
语句“MOV AH4CH”中“4CH”就是相应的功能号因此(7)空缺处需填入“21H”。
⑤结合逻辑尺控制算法的设计思想和试题中给出的指令及寄存器说明表仔细分析试题的程序段先填写(3)、(4)、(6)空缺处的标号内容最后完成(5)空缺处循环计数减1操作(DEC CL)的推理。以下给出该程序段的每条语句的详细解析。
N EQU 14 ;定义循环的总次数
RULE EQU 183CH ;定义逻辑尺
CODE SEGMENT ;CODE段定义伪指令
ASSUME CS:CODE ;段寄存器说明伪指令
START: MOV AXRULE ;AX←逻辑尺标志
MOV CLN ;CL←循环的总次数
LOP: SAL AX1 ;算术左移操作CF←逻辑尺最高位
JC Calculate ;当CF=1时转至Calculate标号处
Collect: CALL Collect_task ;当CF=0时执行Collect_task程序段
JMP NEXT ;无条件转至NEXT标号处
Calculate:CALL Calculate_task ;执行Calculate_task程序段
NEXT: DEC CL ;循环计数CL←CL—1
JNZ LOP ;若CL≠0转至LOP标号处继续循环
MOV AH4CH ;若CL=0结束程序运行返回
INT 21H ;系统功能调用
CODE ENDS ;CODE段定义结束伪指令
END START ;模块结束伪指令
(1)16或等价的二进制数“00010000B” (2)20F3H或等价的二进制数“0010000011110011B” (3)Calculate (4)NEXT (5)DEC CL (6)LOP (7)21H (8)CODE ENDS 这是一道要求读者利用逻辑尺控制法进行循环程序设计的程序分析题。本题的解答思路如下: ①在本案例的循环程序中,循环体又内嵌有多个不同的分支结构。每执行循环体一次,将根据事先规定好的标志位去执行具体的分支程序。试题要求采用逻辑尺控制法实现对于这种结构的循环程序设计。逻辑尺控制法首先应设计一把逻辑“尺”,即用字节、字、双字,甚至根据需要所设置的多字节中的各位表示不同的操作,如果需在循环中执行更多分支,也可采用多位组合。 ②题干中对执行程序段Collect_task和Calculate_task的顺序及次数做了如下约定: Collect_task(2次)→Calculate_task(1次)→Collect_task(5次)→Calculate_task(4次)→Collect_task(2次)→Calculate_task(2次) 由于程序只简单执行两种不同的程序段,因此用一位“0”或“1”来分别标志转向执行两种不同的分支操作。执行程序段Collect_task和Calculate_task共有16次,因此采用一个字(16位)来分别表示这两个程序段的执行顺序和次数。因此(1)空缺处可填人循环的总次数“16”,或者是等价的二进制数“00010000B”。 根据以上分析结果可设计出相应的逻辑尺,如图6-25所示。
图6-25中,阴影部分是程序段Collect_task执行的顺序和次数,其余是程序段 Calculate task执行的顺序和次数。注意,执行“Collect_task(2次)”中第1次执行的 Collect_task任务是放置在逻辑尺的最高位,还是放置在逻辑尺的最低位,由程序段中算术左移操作语句“SAL AX,1”决定。将图6-25所示的逻辑尺的参数定义转换成等价的十六进制数,0010 0000 1111 0011B=20F3H。因此(2)空缺处可填入“20F3H”,或者是等价的二进制数“0010000011110011B”。
③程序中已给出代码(CODE)段定义伪指令“CODE SEGMENT”,由于段定义伪指令的格式是:
段名>SEGMENT[定位方式][连接方式工,类别名,]
段名>ENDS
因此在模块结束伪指令“END START”之前需安排一条“CODE ENDS”,即(8)空缺处需填入CODE段定义结束伪指令一“CODE ENDS”。
④由于程序段中已给出“功能号送入AH寄存器”及“中断返回”等关键信息,由此可判断(7)空缺处需填入某一个中断类型码。由于软中断类型码通常取20H~27H,其中系统功能调用的通用格式是:
功能号送入AH寄存器
INT 21H
语句“MOV AH,4CH”中“4CH”就是相应的功能号,因此(7)空缺处需填入“21H”。
⑤结合逻辑尺控制算法的设计思想和试题中给出的指令及寄存器说明表,仔细分析试题的程序段,先填写(3)、(4)、(6)空缺处的标号内容,最后完成(5)空缺处循环计数减1操作(DEC CL)的推理。以下给出该程序段的每条语句的详细解析。
N EQU 14 ;定义循环的总次数
RULE EQU 183CH ;定义逻辑尺
CODE SEGMENT ;CODE段定义伪指令
ASSUME CS:CODE ;段寄存器说明伪指令
START: MOV AX,RULE ;AX←逻辑尺标志
MOV CL,N ;CL←循环的总次数
LOP: SAL AX,1 ;算术左移操作,CF←逻辑尺最高位
JC Calculate ;当CF=1时,转至Calculate标号处
Collect: CALL Collect_task ;当CF=0时,执行Collect_task程序段
JMP NEXT ;无条件转至NEXT标号处
Calculate:CALL Calculate_task ;执行Calculate_task程序段
NEXT: DEC CL ;循环计数,CL←CL—1
JNZ LOP ;若CL≠0,转至LOP标号处,继续循环
MOV AH,4CH ;若CL=0,结束程序运行,返回
INT 21H ;系统功能调用
CODE ENDS ;CODE段定义结束伪指令
END START ;模块结束伪指令
-
第2题:
Which of the folIowing statements about take-based language teaching is NOT true?A.Students should be given tasks to perform or problems to solve in the classroom.
B.Students are task-driven.
C.Task-based language teaching is student-centered.
D.Task-based language teaching is teacher-centered.答案:D解析:考查任务型语言教学。任务型语言教学以学生为主体,以任务为中心,学生通过参与和完成一系列的任务来习得语言知识。任务型教学法的基本学习步骤分为前任务(pre.task)、任务环(task cvcle)和语言聚焦(1anguage focus)三个部分。故选D。 -
第3题:
Linux 0.11系统中描述进程控制块的数据结构是()
A.task
B.sys_task_table
C.sys_call_table
D.task_struct
操作系统用进程控制块来描述进程的基本情况以及运行变化的过程;进程控制块是进程存在的唯一标志;每个进程都在操作系统中有一个对应的进程控制块;操作系统管理控制进程运行所用的信息集合是进程控制块 -
第4题:
Which of the following statements about take-based language teaching is NOT true?A.Students should be given tasks to perform or problems to solve in the classroom.
B.Student are task-driven.
C.Task-based language teaching is student-centered.
D.Task-based language teaching is teacher-centered.答案:D解析:考查任务型语言教学。任务型语言教学以学生为主体,以任务为中心,学生通过参与和完成一系列的任务来习得语言知识。任务型语言教学法与3P教学模式不同,任务型教学法的基本学习步骤分为前任务(pre.task)、任务环(task cycle)和语言聚焦(language focus)三个部分,“3P”教学法包括演示(presentation)、操练(practice)、成(production)个阶段。两种不同的教学法都属于语言教学法的分支。故选D。 -
第5题:
29、Linux中进程的状态,其中TASK_UNINTERRUPTIBLE表示可唤醒阻塞态,TASK_ZOMBIE表示僵死(僵尸)状态。
答:Linux系统中的进程有执行态、 等待态、停止态和僵尸态等4种状态。 -
第6题:
在Linux操作系统中,运行态和就绪态进程的状态被统一为______。
A.TASK_RUNNING
B.TASK_INTERRUPTIBLE
C.TASK_READY
D.TASK_ZOMBIE
TASK_RUNNING