
一个系统的模块结构图如下所示,用{X,X,X}表示这个系统的测试模块组合。下面的选项中(20)表示自顶向下的测试,(21)表示三明治式测试。A.{A}{A,B,C,D,E}{A,B,C,D,E,F,G,H,I,J,K}B.{F}{G}{H}{I}{J}{K}{B,F,G}{C,H}{D,I,J}{E,K}{A,B,C,D,E,F,G,H,I,J,K}C.{K}{J}{I}{H}{G}{F}{B}{C}{D}{E}{A,B,C,D,E,F,G,H,I,J,K}D.{A}{F}{G}{H}{I}{J}{K}{
题目
一个系统的模块结构图如下所示,用{X,X,X}表示这个系统的测试模块组合。下面的选项中(20)表示自顶向下的测试,(21)表示三明治式测试。

A.{A}{A,B,C,D,E}{A,B,C,D,E,F,G,H,I,J,K}
B.{F}{G}{H}{I}{J}{K}{B,F,G}{C,H}{D,I,J}{E,K}{A,B,C,D,E,F,G,H,I,J,K}
C.{K}{J}{I}{H}{G}{F}{B}{C}{D}{E}{A,B,C,D,E,F,G,H,I,J,K}
D.{A}{F}{G}{H}{I}{J}{K}{B,F,G}{C,H}{D,I,J}{E,K}{A,B,C,D,E,F,G,H,I,J,K}
相似考题
更多“ 一个系统的模块结构图如下所示,用{X,X,X}表示这个系统的测试模块组合。下面的选项中(20)表示自顶向下的测试,(21)表示三明治式测试。A.{A}{A,B,C,D,E}{A,B,C,D,E,F,G,H,I,J”相关问题
-
第1题:
下图(a)是一个程序的模块结构,模块A是主模块。下图(b)是集成测试顺序的示意图。从此图可知,这个集成策略是:
A.自顶向下集成
B.自底向上集成
C.大突击集成
D.三明治式集成
正确答案:B
-
第2题:
13、集成测试时,能较早发现高层模块接口错误的测试方法为()。
A.自顶向下渐增式测试
B.自底向上渐增式测试
C.非渐增式测试
D.系统测试
自顶向下渐增式测试 -
第3题:
集成测试时,能较早发现高层模块接口错误的测试方法是()。
A.自顶向下渐增式测试
B.自底向上渐增式测试
C.非渐增式测试
D.系统测试
B -
第4题:
下图(a)所示为一个模块层次结构的例子,图(b)所示为对其进行集成测试的顺序,则此测试采用了(34)测试策略。该测试策略的优点不包括(35)。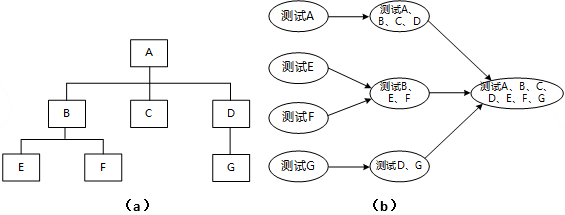 A.自底向上
A.自底向上
B.自顶向下
C.三明治
D.一次性答案:C解析:从先测试A,再测试A、B、C、D可以看出集成测试时用到了自顶向下的方式。
而从先测试E、F,再测试B、E、F可以看出集成测试时用到了自底向上的方式,两者结合即为三明治方式。
这种策略的优点是自顶向下与自底向上两种方式优点的综合,因此较早地验证了主要的控制和判断点且较早地验证了底层模块;同时由于可以两端向中间发展,其效率较高,运用一定的技巧,减少了桩模块和驱动模块的开发。本题缺乏严谨性。 -
第5题:
线性位移不变系统的图像退化数学模型是假定成像系统是线性位移不变系统(退化性质与图像的位置无关),它的点扩散函数用h(x,y)表示,受到加性噪声的干扰用n(x,y)表示,则获取的图像g(x,y)表示为()。
A.g(x,y)=f(x,y)*h(x,y)-n(x,y)
B.g(x,y)=f(x,y)*h(x,y)+n(x,y)
C.g(x,y)=f(x,y)/h(x,y)+n(x,y)
D.g(x,y)=f(x,y)+h(x,y)+n(x,y)
复指数基元函数;点扩散函数是实函数的线性平移不变系统,本征函数是正余弦函数