
下列哪个方程表示的系统为非线性系统?()
题目
相似考题
更多“下列哪个方程表示的系统为非线性系统?() ”相关问题
-
第1题:
某系统的微分方程为,它是()。A、线性系统
B、线性定常系统
C、非线性系统
D、非线性时变系统
参考答案:A
-
第2题:
按描述系统运动的微分方程可将系统分为( )自动控制系统。A: 线性
B: 非线性
C: 连续性
D: 非连续性
正确答案: A,B
-
第3题:
非线性系统方程为,则系统的平衡点是( ) 。
A. 1,2
B. 1,4
C. 0,2
D. 0,4
正确答案:B
-
第4题:
对()进行拉普拉斯变换,可以得到系统在复数域的数字模型称为传递函数。A.线性定常微分方程
B.非线性微分方程
C.非线性时变微分方程
D.线性时变微分方程
参考答案:A
-
第5题:
下列描述系统的微分方程中,r(t)为输入变量,c(t)为输出变量,方程中为非线性时变系统的是( )。 答案:C解析:非线性系统是指系统中存在非线性元件,且需用非线性微分方程来描述的系统。A项,方程是线性常微分方程,系统是线性定常系统;B项,只有输出一阶导数的系数是时间函数t,系统是线性时变系统;C项,有输出变量c(f)的开平方项,其系数是时间函数b(t),系统是非线性时变系统。D项,方程为线性定常方程,系统是线性定常系统。
答案:C解析:非线性系统是指系统中存在非线性元件,且需用非线性微分方程来描述的系统。A项,方程是线性常微分方程,系统是线性定常系统;B项,只有输出一阶导数的系数是时间函数t,系统是线性时变系统;C项,有输出变量c(f)的开平方项,其系数是时间函数b(t),系统是非线性时变系统。D项,方程为线性定常方程,系统是线性定常系统。 -
第6题:
下列描述系统的微分方程中,r(z)为输入变量,c(t)为输出变量,方程中为非线性时变系统的是( )。A.
B.
C.
D. 答案:C解析:
答案:C解析: -
第7题:
非线性调节系统不能用线性微分方程来描述。
正确答案:正确 -
第8题:
dc(t)/dt+a根号[c(t)]=kr(t),则该描述系统微分方程可判断为()
- A、线性定常系统
- B、线性时变系统
- C、非线性定常系统
- D、非线性时变系统
正确答案:C -
第9题:
自动控制系统按描述元件的动态方程分()
- A、随动系统
- B、恒值控制系统
- C、线性系统
- D、非线性系统
正确答案:C,D -
第10题:
线性常系数微分方程表示的系统,方程的齐次解称为自由响应。
正确答案:正确 -
第11题:
多选题非线性控制系统特点有()A系统只能用非线性微分方程来描述
B系统可以用叠加原理
C系统中具有非线性性质的环节
D多输入/多输出
E系统不可以用叠加原理
正确答案: C,D解析: 暂无解析 -
第12题:
判断题线性控制系统各环节均可用线性微分方程来描述,非线性控制系统中环节都具有非线性性质。A对
B错
正确答案: 错解析: 暂无解析 -
第13题:
线性系统与非线性系统的根本区别在于()A、线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数
B、线性系统只有一个外加输入,而非线性系统有多个外加输入
C、线性系统满足迭加原理,非线性系统不满足迭加原理
D、线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少
参考答案:C
-
第14题:
简单系统一般表示为微分方程。()
正确答案:×
-
第15题:
某系统的微分方程为x0(t)-x0(t)+x0^3=xi(t),则它是()。A.线性定常系统
B.线性系统
C.非线性系统
D.非线性时变系统
正确答案:C
-
第16题:
系统的微分方程为c(t)=r(t)cosωt+5,则系统属于()。A、离散系统
B、线性定常系统
C、线性时变系统
D、非线性系统
正确答案:D
-
第17题:
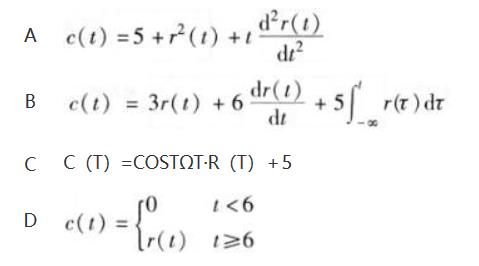
下列哪个方程表示的系统为非线性系统?( )。A.
B.
C.
D. 答案:A解析:A方程中,有变量的平方项,有系数是时间函数t,系统是非线性时变系统。B方程中,等式两边求导一次,方程是线性常微分方程,系统是线性定常系统。C方程中,只有系数是时间函数t,系统是线性时变系统。D方程中,有系数与时间函数t有关,线性时变系统,分段时不变系统。
答案:A解析:A方程中,有变量的平方项,有系数是时间函数t,系统是非线性时变系统。B方程中,等式两边求导一次,方程是线性常微分方程,系统是线性定常系统。C方程中,只有系数是时间函数t,系统是线性时变系统。D方程中,有系数与时间函数t有关,线性时变系统,分段时不变系统。 -
第18题:

表示非线性药动学方程的是答案:E解析: -
第19题:
Z变换的作用包括()。
- A、求解线性常系数差分方程
- B、求解非线性差分方程
- C、导出离散时间线性定常系统的脉冲传递函数
- D、导出离散时间非线性定常系统的脉冲传递函数
正确答案:A,C -
第20题:
自动控制系统主要元件的特性方程式的性质,可以分为()和非线性控制系统。
正确答案:线性控制系统 -
第21题:
对()进行拉普拉斯变换,可以得到系统在复数域的数字模型称为传递函数。
- A、线性定常微分方程
- B、非线性微分方程
- C、非线性时变微分方程
- D、线性时变微分方程
正确答案:A -
第22题:
单选题dc(t)/dt+a根号[c(t)]=kr(t),则该描述系统微分方程可判断为()A线性定常系统
B线性时变系统
C非线性定常系统
D非线性时变系统
正确答案: A解析: 暂无解析 -
第23题:
填空题自动控制系统主要元件的特性方程式的性质,可以分为()和非线性控制系统。正确答案: 线性控制系统解析: 暂无解析