
某市的基础控制网,因受城市建设、自然环境、人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换。 现处于技术设计阶段。根据实际情况,控制网采用三等GPS网;拟用1 0台仪器,采用点连式进行观测,布设3 7 个GPS C级点。 【问题】 1.简述三等大地控制网的目的和技术要求。 2.简述技术设计的目的和步骤。 3.计算该网的总基线数、必要基线数独立基线数和多余基线数。
题目
某市的基础控制网,因受城市建设、自然环境、人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换。
现处于技术设计阶段。根据实际情况,控制网采用三等GPS网;拟用1 0台仪器,采用点连式进行观测,布设3 7 个GPS C级点。
【问题】
1.简述三等大地控制网的目的和技术要求。
2.简述技术设计的目的和步骤。
3.计算该网的总基线数、必要基线数独立基线数和多余基线数。
相似考题
更多“某市的基础控制网,因受城市建设、自然环境、人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换。 ”相关问题
-
第1题:
房产测绘控制测量成果检查的主要内容有()等。A:控制测量网的布设和标志埋设是否符合要求
B:各种观测记录和面积分摊计算是否正确
C:各类控制点的测定方法、扩展次数及各种限差、成果精度是否符合要求
D:起算数据和计算方法是否正确,平差的成果精度是否满足要求
E:高程起算点是否满足要求答案:A,C,D解析:按现行《房产测量规范》(GB/T17986.1-2000)规定,B、E不符合题意;其他选项符合题意。故选ACD。 -
第2题:
某市的基础控制网,因受城市建设、自然环境,人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查,补埋、观测、计算及成果的坐标转换等。 现处于技术设计阶段。根据实际情况,控制网采用三等GPS网,拟用10台仪器,采用点连式进行观测,布设37个CPS C级点。
1小题>
简述三等大地控制网的目的和技术要求。
2小题>
简述技术设计的目的和步骤。
3小题>
计算该网的总基线数、必要基线数、独立基线数和多余基线数。答案:解析:1小题>主要考查的是三等大地控制网的目的和技术要求。三等大地控制网布测的目的是建立和维持省级(或区域)大地控制网,满足国家基本比例尺测图的基本需求;结合水准测量、重力测量技术,精化省级(或区域)似大地水准面。三等大地控制网相邻点间基线水平分量的中误差不应超过±10mm,垂直分量的中误差不应超过±20mm;各控制点的相对精度应不低于1×10-6,其点间平均距离不应超过20km。三等大地控制网点的布设应与省级基础测绘服务、现有技术状况、应用水平及似大地水准面精化等目标相一致,并应尽可能布设在三、四等水准路线上。三等大地控制网应根据需要进行复测或更新。
2小题>主要考查的是技术设计的目的和步骤。技术设计的目的是制定切实可行的技术方案,保证测绘产品符合相应的技术标准和要求,并获得最佳的社会效益和经济效益。一般步骤如下:(1)收集资料。收集测区有关资料,包括测区的自然地理和人文地理,交通运输,各种比例尺地形图、交通图,气象资料以及已有的大地测量成果资料,如点之记、成果表及技术总结等。对收集资料加以分析和研究,选取可靠和有价值的部分作为设计时的参考。(2)实地踏勘。拟订布网方案和计划时,需要到测区进行必要的踏勘和调查,作为设计时的参考。(3)图上设计。根据大地测量任务,按照有关规范和技术规定,在地形图上拟定出控制点的位置和网的图形结构。(4)编写技术设计书。按照编写设计书的要求编制技术设计书。
3小题>主要考查的是大地控制网的总基线数、必要基线数、独立基线数和多余基线数的计算。
计算该网的总基线数、必要基线数、独立基线数和多余基线数。
观测总点数37个,重复点3个,每点平均设站数为:(37+3)/37=1. 08;
观测时段数:C=n.m/N=37×1.08/10=4
总基线数:J总=C.N.(N-l)/2 =4×10×9/2 =180:
必要基线数:J必=n-1=36;
独立基线数:J独=C.(N-l)=4×9=36:
多余基线数:J多=C.(N-1)- (n-1)=36-36=0 -
第3题:
三等控制网
1)工程概况
××市的现有基础控制网,因自然环境变化、城市扩张、人为活动等因素的影响,目前的大地控制网点难以满足经济建设发展的需要。为了保证基础控制网的功能,计划在区域范围内利用全球导航卫星系统(GNSS)技术建立三等大地控制网。
2)问题
(1)根据项目要求,确定GNSS技术测量等级和观测技术规定。
(2)××测绘院用7台GPS接收机采用边连接方式完成全部3 5个GPS点的观测,试计算该网特征数。
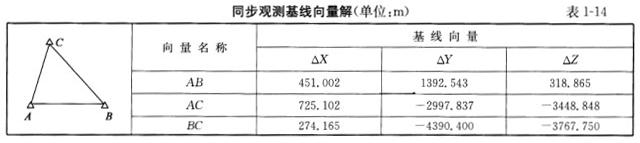
(3)某个外业同步环结果见表1-14。若取σ=5cm,试对该测量成果进行评价。
答案:解析:三等控制网
(1)根据项目要求,确定GNSS技术测量等级和观测技术规定。
①确定测量精度等级
a.国家三等大地控制网技术要求。国家三等大地控制网相邻点间基线水平分量的中误差不应大于±10mm,垂直分量的中误差不应大于±20mm;各控制点的相对精度应不低于1*10-6,其点间平均距离不应超过20km。
b.GPS测量精度。 B、C、D、E级GPS网测量精度见表1-16 。
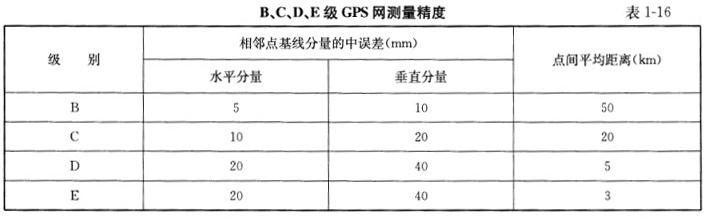
C.GNSS技术测量等级选择。根据国家三等大地控制网技术要求和GPS测量精度要求,确定该市控制网采用C级GNSS测量。
②观测要求
C级GPS网观测的基本技术规定如下:a.卫星截止高度角为15°;b.同时观测有效卫星数≥4颗;c.有效观测卫星总数≥6颗;d.观测时段数≥2;e.时段长度≥4h;f.采样间隔为10~30s。
(2)××测绘院用7台GPS接收机采用边连接方式完成全部3 5个GPS点的观测,试计算该网特征数。
GPS控制点数n=3 5,接收机数k=7 。
①重复点计算
边连接是指相邻的同步图形间有一条边(即两个公共点)相连,重复点数计算式为:
w=u*(v-1)
式中:w——重复点数;
u——公共点数;
v——同步图形数。
7台GPS接收机为了完成3 5个点的测量,至少要构成v=7个同步图形,两个同步图形有u=2个公共点,所以w=2*( 7-1) =12。
②平均重复设站数
m=(n+w)/n=(35+12)/35=1. 34
③GPS网特征数计算
全网观测时段数C=n*m/k=35*1.34/7≈7
基线向量总数J总C*{[k*(k-1)]/2}=7*[(7*6)/2]=147条
独立基线向量数J独=C*(k-1)=7*6=42条
必要基线向量数J必=n-1=34条
多余基线向量数J多=J独-J必=42 - 34=8条
(3)某个外业同步环结果见表1-14 。若取σ=5cm,试对该测量成果进行评价。
①计算闭合差
Wx=∑△X=△XAB+△XBC+△XCA=451. 002+274. 165 - 725. 102=0.065m=65mm
Wy=∑△Y=△YAB+△YBC+△YCA=1392. 543 - 4390. 400+2997. 837=-0.020m=-20mm
Wz=∑△Z=△ZAB+△ZBC+△ZCA=318.865 - 3767.7500+3448.848=-0.037m=-37mm
②计算限差
σ=5cm=50mm,限差:

③结论
由于Wx、Wy、Wz均大于限差,同步环检验不合格,成果不可靠。
-
第4题:
地图的数学要素包括地图的()等内容,是地图制图的基础
A比例尺
B控制点
C坐标网
D地图定向
E分幅编号
A,B,C,D
略 -
第5题:
平面控制测量步骤正确的是()。 ①、根据主轴线再进行建筑物的细部放样②、分别建立建筑物施工控制网 ③、建立场区控制网④、以平面控制网的控制点为基础,测设建筑物的主轴线
- A、②①③④
- B、③②④①
- C、③①②④
- D、④①③②
正确答案:B -
第6题:
位移观测是在()的基础上进行。
- A、高程控制网
- B、平面控制网
- C、平面与高程控制网
- D、不需要控制网
正确答案:C -
第7题:
地面平面控制网的测量步骤()
- A、收集资料→现场踏勘→选点→埋石→控制网观测
- B、现场踏勘→收集资料→选点→埋石→控制网观测
- C、现场踏勘→选点→设计方案→埋石→控制网观测
- D、现场踏勘→选点→埋石→控制网观测→收集资料
正确答案:A -
第8题:
平面控制网在(CP0)的基础上分三级布设,第一级为()平面控制网(CPⅠ),主要为勘测、施工和运营维护提供坐标基准。
正确答案:基础 -
第9题:
单选题对控制网进行布设、观测、记录的测量工作称为()。A控制网平差
B控制测量
C控制网测量
D常规测角
正确答案: A解析: 由控制点构成的几何图形称为控制网,对控制网进行布设、观测、记录的测量工作称为控制网测量,根据控制网测量成果,进行控制点坐标的计算称为控制网平差。控制网测量与控制网平差统一称为控制测量。 -
第10题:
多选题地图的数学要素包括地图的()等内容,是地图制图的基础A比例尺
B控制点
C坐标网
D地图定向
E分幅编号
正确答案: E,A解析: 暂无解析 -
第11题:
单选题一般建筑工程,通常先布设(),再以施工控制网为基础,开展建筑物轴线测量和细部放样等施工测量工作。A高程控制网
B城市控制网
C轴线控制网
D施工控制网
正确答案: D解析: 暂无解析 -
第12题:
单选题高速铁路工程测量平面控制网应在框架控制网(CP0)基础上分三级布设,其中第二级()网(CPⅡ),主要为勘测和施工提供控制基准。A基础平面控制网
B线路平面控制网
C轨道控制网
D监测控制网
正确答案: A解析: 暂无解析 -
第13题:
某市的基础控制网,因受城市建设,自然环境、人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换等。
1.已有资料情况
该市基础控制网的观测数据及成果;联测国家高等级三角点5个,基本均匀覆盖整个城市区域,各三角点均有1 9 8 0西安坐标系成果;城市及周边地区的GPS连续运行参考站观测数据及精确坐标;城市及周边地区近期布设的国家GPS点及成果。
2.控制网测量精度指标要求
控制网采用三等GPS网,主要技术指标见下表

3.外业资料的检验
使用随接收机配备的商用软件对观测数据进行解算。对同步环闭合差、独立闭合环闭合差、重复基线较差进行检核,各项指标应满足精度要求:
(1)同步环各坐标分量闭合差(WX、WY、WZ)

其中,σ为基线测量误差。
(2)独立闭合坐标闭合差WS和各坐标分量闭合差(WX、WY、WZ)

其中,σ的含义同上,n表示闭合环边数。
(3)重复基线的长度较差ds应满足规范要求
项目实施中,测得某一基线长度约10km,重复基线的长度较差95. 5mm,某一由6条边(平均边长约5km)组成的独立闭合环,其X、Y、Z坐标分量的闭合差分别为60. 4mm、160. 3mm、90. 5mm。
4.GPS控制网平差解算
(1)三维无约束平差;
(2)三维约束平差。
5.坐标转换
该市基于2 00 0国家大地坐标系建立了城市独立坐标系,该独立坐标系使用中央子午线为东经×××°××′××″Ⅳ任意带高斯平面直角坐标。通过平差与严密换算获得城市基础控制网2 00 0国家大地坐标系与独立坐标系成果后,利用联测的5个高等级三角点成果,采用平面二维四参数转换模型,获得了该基础控制网1 9 5 4北京坐标系与1 9 8 0西安坐标系成果。
【问题】
1.计算该重复基线长度较差的最大允许值,并判定其是否超限。
2.计算该独立闭合环坐标与坐标分量闭合差的限差值,并判定闭合差是否超限。
3.简述该项目GPS数据处理的基本流程。
4.简述该项目1 9 8 0西安坐标系与独立坐标系转换关系建立方法及步骤。
(上述计算:计算过程保留小数点后两位,结果保留小数点后一位)
答案:解析:1.根据题意要求,重复基线的长度较差ds应满足规范要求。现行规范要求重复基线的长度较差应满足下式的要求:{图3} ,d为基线边长。将相关数据代入上式有:
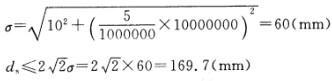
题中往返较差为95. 5mm<169. 7mm,故不超限。
2.首先计算基线测量误差:
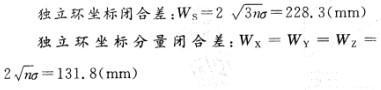
实测得:WX=60.4mm;WY=160.3mm; WZ=90. 5mm
WX、WZ小于其容许值,但WY=160.3>131.8,
故判定该独立环闭合差超限。
3.该项目GPS数据处理流程如下:
(1)数据准备,将全部数据文件导入处理软件;
(2)已知数据导入(5个高等级三角点的1 9 80西
安坐标系坐标);
(3)基线解算,主要完成外业观测数据质量检核和基线精处理结果检核,具体包括对基线精度、同步环、独立环和重复基线闭合差、较差情况的考察、分析和处理,必要时对某些测站进行重测;
(4)WGS—84坐标系下三维平差(无约束平差)及其精度分析并决定处理办法;
(5)1980西安坐标系下二维平差(利用5个高等级三角点1 9 80西安坐标系坐标作为约束条件的约束平差)及其精度分析并决定处理办法;
(6)输出平差结果。
4.根据题中已有观测条件,可利用联测的5个高等级三角点成果,采用平面二维四参数转换模型整体进行坐标转换方法。具体步骤如下:
(1)将5个高等级三角点的1 980西安坐标系坐标通过换带计算转换为中央子午线与城市独立坐标系中央子午线(××°××′××″)相同的任意带坐标(X、Y)。
(2)选定用于计算坐标转换参数的重合点(不得少于2个)。
(3)确定计算坐标转换参数方法与模型。若5个高等级三角点的1980西安坐标系坐标为(X,Y)及城市独立坐标系坐标为(A,B),可利用下面的计算坐标转换参数模型:A=Δx+k·cosα·X—k·sinα·y,B=Δy+k·sinα·X+k·cosα·Y。根据最小二乘原理,即可求出Δx、Δy、k、α等转换参数。
(4)分析重合点坐标转换残差,若残差合限,则转换参数计算完成。否则,剔除粗差点,重新计算转换参数数
-
第14题:
××市的基础控制网,因受城市建设、自然环境、人为活动等因素的影响,测量标志不断损坏、减少,为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换等。
现有该市基础控制网的观测数据及成果;联测国家高等级三角点5个,基本均匀覆盖整个城市区域,各三角点均有1980西安坐标系成果;城市及周边地区的GPS连续运行参考站观测数据及精确坐标;城市及周边地区近期布设的国家GPS点及成果。控制网采用三等GPS网,主要技术指标见下表。

外业资料的检验使用随接收机配备的商用软件对观测数据进行解算,对同步环闭合差、异步环闭合差、重复基线较差进行检核,各项指标应满足精度要求。

式中:σ为基线测量误差,n为闭合环边数。
重复基线的长度较差( dS)应满足规范要求。
项目实施中,测得某一基线长度约为10 km,重复基线的长度较差95.5 mm;某一由6条边(平均边长约为5 km)组成的独立闭合环,其X、Y、Z坐标分量的闭合差分别为60.4 mm、160.3 mm、90.5 mm。
GPS控制网平差解算包括三维无约束平差和三维约束平差。
该市基于2000国家大地坐标系建立了城市独立坐标系。该独立坐标系使用中央子午线为东经×××°15'任意带高斯平面直角坐标。通过平差与严密换算获得城市基础控制网2000国家大地坐标系与独立坐标系成果后,利用联测的5个高等级三角点成果,采用平面二维四参数转换模型,获得了该基础控制网1954北京坐标系与1980西安坐标系成果。
问题
(1)计算该重复基线长度较差的最大允许值,并判定其是否越限。
(2)计算该独立闭合环坐标与坐标分量的闭合差的限差值,并判定闭合差是否越限。
(3)简述该项目GPS数据处理的基本流程。
答案:解析:(1)可以将最弱边相对中误差理解为边长相对误差的极限值,即
MSlim/S=(2*MS/S)=1/80 000
式中:MS为边长相对中误差;S为边长。
题中指定边的误差的极限值
MSlim =2*MS=10 000 000 mm*1/80 000 =125 mm
可以算得
MS=62.5 mm
因为边长测量值
S= (S1+S2)/2
式中:S1、S2分别为往返测量值。
往返测较差
dS =S1-S2
根据误差传播率,则有
(MS)2=(m1/2)2+( m2/2)2
(MdS)2=(m1)2+ (m2)2
式中:m1、m2分别为往返测量中误差。
假定往返测精度相同,即m1=m2=m可推得
如果取两倍中误差作为极限误差,则较差极限值(允许值)=2MdS =4M=250 mm,中往返较差为95.5 mm<250 mm,故不超限。
(2)首先计算基线测量误差

均大于其容许值,故判定该独立环闭合差超限。
(3)数据处理流程如下:
④数据准备,包括输入必要数据(如测站名称、仪器高)、将全部数据文件转换成数据处理软件认可的格式等;
②将全部数据文件导入处理软件:
③已知数据导入(5个高等级三角点的1980西安坐标系坐标);
④基线解算,包括对基线精度、同步环、异步环和重复基线闭合差、较差情况的考察、分析和处理,必要时对某些测站进行重测:
⑤WGS—84坐标系下三维平差(无约束平差)及其精度分析并决定处理办法:
⑥1980西安坐标系下二维平差(利用5个高等级三角点1980西安坐标系坐标作为约束条件的约束平差)及其精度分析并决定处理办法;
⑦输出平差结果。
-
第15题:
施工控制网建立
1)工程概述
××核电二期工程是中国自行设计建造的大型商用压水堆核电项目,是国家重点工程。
总装机容量2*600MW,包括核岛、常规岛及BOP三部分,工程总占地面积365km2,总建筑面积175603m2 。其厂址位于××省××县城西南约10km的××镇。在施工控制网建立前夕,现场土石方开挖及场地平整已完成,通视条件较好。厂区周边地带可供使用的测量控制点共有4个,为前期勘察时建立,点号分别为Ⅲ-1 5,Ⅲ-1 7,Ⅲ-1 9和Ⅲ-20。现有的控制点虽基本上覆盖了施工厂区,但相互间距离太远,精度较低,数量也无法满足施工需要。因此,为保证工程建设需要,厂区应及时建立二期施工测量控制网。
2)施工控制网的布设要求
二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法。建成后的二期施工控制网应同时满足以下条件:
(1)控制点的点位布置合理,其精度及数量应满足工程建设的需要。
(2)控制点间应保持良好的通视条件,每一控制点应有两个以上控制点与之相互通视。
(3)控制点应稳定可靠,施工期内不发生自身的位移、沉降变形。
(4)为方便施工,施工控制网一般采用独立坐标系和自由边角网,以保证控制网的相对定位精度。
3)平面控制网观测方案选择
(1)平面控制网网形
为便于工程建筑的安装施工,二期施工控制网采用独立工程坐标系。为保证控制网的相对精度,控制网采用自由边角网,其网形如图3-2所示。其中,起算点Cl由原首级网的Ⅲ-1 7、Ⅲ-1 9、Ⅲ-2 0三点(成果为1 980西安坐标系),通过三角形插点的方法确定,同时以Cl为测站点,与首级网联测Cl-C10的方位角,作为控制网的起算方位角。

(2)平面控制网观测仪器的选用
从施工控制网的精度确定可以看到,由于控制网的测角及测边精度要求都很高,观测难度较大,同时考虑到在工程建设中,还要依据施工控制网建立精度更高的安装基准点及进行局部高精度的施工放样工作,因此本工程选用了精度相对较高的TCA 2003全站仪,其测角精度为0.5″,测距标称精度为1mm+1ppm*D。
(3)控制网观测测回数的确定
二期工程施工控制网角度观测测回数是根据实际采用的仪器精度、现场控制点布设特点,以及角度和边长测量应达到的精度,并参考《工程测量规范》(GB 50026-2007)中二、三等三角测量测角中误差及测回数确定原则确定的。本施工控制网角度及边长观测测回数均定为6测回,其中边长观测要进行往返观测。
4)高程控制网的布设与精度确定
与平面控制点相比,高程控制点具有相对独立性。二期工程高程控制网以远离施工区的原首级控制点Ⅳ2 7号点为起算点(成果为1 9 8 5国家高程基准),布设一条二等闭合水准路线,以保证安装施工及厂区变形观测的精度要求。测量仪器采用WILDN3+线条式因瓦合金水准尺。按《工程测量规范》(GB 50026-2007)中二等水准测量规定实施,进行分段往返观测。
5)平面控制网的外业观测及平差结果
二期施工控制网共计观测了7 7个三角形,最大闭合差-5.51″,最小0.02″,平均闭合差1. 78″,按菲列罗公式计算的三角形测角中误差mβ=±1.3″。测距边共计3 2条,测距中误差md=0.7 3mm,最弱边边长相对中误差为1/134000。
在控制网各外业观测完毕,且观测值满足各项观测限差后,即可进行控制网平差计算。平差结果:测角中误差mβ=1. 09″,测距中误差ms=0.96mm,最大点位中误差mp=1.5mm,最小点位中误差mp=0.5mm,平均点位中误差mp=0.8mm。6)高程控制网外业观测及平差结果
与平面控制网相比,高程控制网外业观测及数据处理较为简单。高程控制网外业观测共分9段,往返测最大较差-1.01mm,最小较差为0mm,往返测平均较差为0.31mm。线路C1-C8-C5-C4-C3-C2-C1闭合差为0.38mm(线路长1.2km),每公里高差中数偶然中误差m=±0.46mm 。
7)问题
(1)施工平面控制网一般有哪几种形式?简述工程控制测量平面控制网的布设原则。
(2)简述工程高程控制测量的一般规定。
(3)二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法,请列出《工程测量规范》(GB 50026-2007)三等三角形网测量限差要求和二等水准测量限差要求,并判断该工程控制测量成果是否合格。
答案:解析:施工控制网建立
(1)施工平面控制网一般有哪几种形式?简述工程控制测量平面控制网的布设原则。施工平面控制网的形式一般有三角网、导线网、边角网和GPS网。现在GPS测量是建立施工控制网的主要手段。
工程控制测量平面控制网的布设原则:
①首级控制网的布设,应因地制宜,且适当考虑发展;当与国家坐标系统联测时,应同时考虑联测方案。
②首级控制网的等级,应根据工程规模、控制网的用途和精度要求合理确定。
③加密控制网,可越级布设或同等级扩展。
(2)简述工程高程控制测量的一般规定。
①高程控制测量精度等级的划分,依次为二、三、四、五等;各等级高程控制宜采用水准测量,四等及以下等级可采用电磁波测距三角高程测量,五等也可采用GPS拟合高程测量。
②首级高程控制网的等级,应根据工程规模、控制网的用途和精度要求合理选择;首级网应布设成环形网,加密网宜布设成附合路线或结点网。
③测区的高程系统,宜采用1 9 8 5国家高程基准;在已有高程控制网的地区测量时,可沿用原有的高程系统;当小测区联测有困难时,也可采用假定高程系统。
④高程控制点间的距离,一般地区应为1~3km,工业厂区、城镇建筑区宜小于1km;但一个测区及周围至少应有3个高程控制点。
(3)二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法,请列出《工程测量规范》(GB 50026-2007)三等三角形网测量限差要求和二等水准测量限差要求,并判断该工程控制测量成果是否合格。
依据《工程测量规范》(GB 50026-2007)第3.4.1条规定,三等三角形网测量限差要求:测角中误差为1.8″,测边相对中误差为1/150000,最弱边边长相对中误差为1/70000,三角形最大闭合差为7″。
依据《工程测量规范》(GB 50026-2007)第4.2.1条规定,二等水准测量限差要求:每公里高差全中误差2mm,每公里高差中数偶然中误差1mm,往返较差、附合差或闭合差不大于
 [为水准路线长度(km)]。
[为水准路线长度(km)]。经过核对,该工程控制测量的所有成果都满足限差要求,成果是合格的。
-
第16题:
测绘产品数学基础检查的内容不包括()。
- A、图廓点坐标
- B、千米网交点坐标
- C、控制点坐标
- D、抽查的碎部点坐标
正确答案:D -
第17题:
CPⅢ控制网测量准备工作包括()
- A、区段沉降变形观测评估通过
- B、桥梁防撞墙和路基接触网杆基础完成
- C、精测网复测完成,复测报告评审通过
- D、CPⅢ测量技术方案报批通过
- E、CPⅡ加密点和CPⅢ标志预埋完成
正确答案:A,B,C,D,E -
第18题:
对控制网进行布设、观测、记录的测量工作称为()。
- A、控制网平差
- B、控制测量
- C、控制网测量
- D、常规测角
正确答案:C -
第19题:
下列属于数学基础的有()。
- A、控制点、比例尺、交通网
- B、比例尺、境界线、坡度尺
- C、控制点、坐标网、地图定向
- D、编图时间、居民地、独立地物
正确答案:C -
第20题:
单选题工程测量包括控制网测量和施工过程控制测量两部分内容。它们之间的相互关系是:(),两者的目标都是为了保证工程质量。A控制网测量是土建工程施工的任务,施工过程控制测量是机电安装的任务
B控制网测量是测量的基础,施工过程测量是控制网测量的具体应用
C控制网测量是采用精度较低的仪器,施工过程测量使用的仪器精度较高
D控制网测量是工程施工的先导,施工过程控制测量是施工进行过程的眼睛
正确答案: A解析: 暂无解析 -
第21题:
问答题某市的基础控制网,因受城市建设、自然环境、人为活动等因素的影响,测量标志不断损坏、减少。为了保证基础控制网的功能,该市决定对基础控制网进行维护,主要工作内容包括控制点的普查、补埋、观测、计算及成果的坐标转换等。 1.已有资料情况 该市基础控制网的观测数据及成果;联测国家高等级三角点5个,基本均匀覆盖整个城市区域,各三角点均有1980西安坐标系成果;城市及周边地区的GPS连续运行参考站观测数据及精确坐标;城市及周边地区近期布设的国家GPS点和成果。 2控制网测量精度指标要求 控制网采用三等GPS网,主要技术指标见下表: 3.外业资料的检验 使用随接收机配备的商用软件对观测数据进行解算。对同步环闭合差、独立闭合环闭合差、重复基线较差进行检核,各项指标应满足精度要求: (1)同步环各坐标分量闭合差(Wx、Wy、Wz) (3)重复基线的长度较差d。应满足规范要求。 项目实施中,测得某一基线长度约1Okm,重复基线的长度较差95. 5mm,某一由6条边(平均边长约5km)组成的独立闭合环,其X、y、Z坐标分量的闭合差分别为60. 4mm、160. 3mm、90. 5mm。 4.GPS控制网平差解算 (1)三维无约束平差; (2)三维约束平差。 5.坐标转换 该市基于2000国家大地坐标系建立了城市独立坐标系,该独立坐标系使用中央子午线为东经×××°××′××″任意带高斯平面直角坐标。通过平差与严密换算获得城市基础控制网2000国家大地坐标系与独立坐标系成果后,利用联测的5个高等级三角点成果,采用平面二维四参数转换模型,获得了该基础控制网1954北京坐标系与1980西安坐标系成果。 【问题】 1.计算该重复基线长度较差的最大允许值,并判定其是否超限。 2.计算该独立闭合环坐标与坐标分量闭合差的限差值,并判定闭合差是否超限。 3.简述该项目GPS数据处理的基本流程。 4.简述该项目1980西安坐标系与独立坐标系转换关系建立方法及步骤。 (上述计算:计算过程保留小数点后两位,结果保留小数点后一位)正确答案:解析: -
第22题:
单选题各级平面高程控制网应满足无砟轨道铁路工程不同阶段的需要,其中定测阶段应建立()。A基础平面控制网和勘测高程控制网
B线路控制网及水准基点控制网
C基桩控制网及控制点高程测量网
正确答案: A解析: 暂无解析 -
第23题:
单选题位移观测是在()的基础上进行。A高程控制网
B平面控制网
C平面与高程控制网
D不需要控制网
正确答案: B解析: 暂无解析