
就CGCS2000坐标系所依据的2000国家GPS网数据处理结果而言,下列说法正确的是()A相对精度为10-5-10-6B参考框架为ITRF2000C参考框架为ITRF97D参考历元为2000.0
题目
A相对精度为10-5-10-6
B参考框架为ITRF2000
C参考框架为ITRF97
D参考历元为2000.0
相似考题
更多“就CGCS2000坐标系所依据的2000国家GPS网数据处理结果而言,下列说法正确的是()”相关问题
-
第1题:
关于2000国家GPS网数据处理结果,下列说法正确的是()。A:参考框架ITRF97
B:历元2000.0
C:由2500多个点组成
D:相对精度为10-6
E:仅使用GPS卫星观测数据答案:A,B,C解析:2000国家GPS网数据处理:参考框架为ITRF97,历元为2000.0,参加计算的GPS点2500多个,充分利用了GPS卫星和国际IGS站的信息,相对精度达到10-9。故选ABC。 -
第2题:
在定义上,CGCS2000与WGS84是()的,即关于坐标系原点、尺度、定向及定向演变的定义都是()的。
正确答案:一致;相同 -
第3题:
我国开始使用的“CGCS2000”坐标系是()。
正确答案:地心空间直角坐标系 -
第4题:
当采用CGCS2000作为项目坐标系进行GPS RTK作业时,()。
- A、应进行WGS84坐标系至CGCS2000坐标系的三参转换
- B、应进行WGS84坐标系至CGCS2000坐标系的七参转换
- C、先进行七参转换,再进行三参转换
- D、不需在两坐标系间进行转换
正确答案:D -
第5题:
GPS测量所采用的坐标系是()。
- A、WGS-84大地坐标系
- B、1980国家大地坐标系
- C、高斯坐标系
- D、独立坐标系
正确答案:A -
第6题:
判断题在坐标系的实现精度范围内,CGCS2000坐标和WGS84(G1150)坐标是一致的。对一般的工程测量而言,可以认为两套坐标系统是一致的。A对
B错
正确答案: 对解析: 暂无解析 -
第7题:
填空题CGCS2000大地坐标系原点在(),是右手地固直角坐标系, Z轴为国际地球旋转局参考极方向。正确答案: 地心解析: 暂无解析 -
第8题:
填空题我国开始使用的“CGCS2000”坐标系是()。正确答案: 地心空间直角坐标系解析: 暂无解析 -
第9题:
单选题在GPS测量时,接收机直接得到的是()的坐标。AWGS-84坐标系
B北京54坐标系
C国家80坐标系
D国家2000坐标系
正确答案: D解析: 暂无解析 -
第10题:
多选题《全球定位系统(GPS)测量规范》GB/T18314—2009基本规定内容为()AGPS测量采用2000国家大地坐标系统及GPS时间系统,手簿记录采用世界协调时(UTC.
B用于各级GPS网测量的仪器应经法定计量检定合格,并在检定有效期内使用
C中误差作为各级GPS网测量精度的技术指标,且以2倍中误差作为极限误差
D应按坐标转换方法求得1980西安坐标系、1954北京坐标系或其他坐标系成果
正确答案: A,C解析: 暂无解析 -
第11题:
单选题当采用CGCS2000作为项目坐标系进行GPS RTK作业时,()。A应进行WGS84坐标系至CGCS2000坐标系的三参转换
B应进行WGS84坐标系至CGCS2000坐标系的七参转换
C先进行七参转换,再进行三参转换
D不需在两坐标系间进行转换
正确答案: C解析: 暂无解析 -
第12题:
单选题GPS测量所采用的坐标系是()。AWGS-84大地坐标系
B1980国家大地坐标系
C高斯坐标系
D独立坐标系
正确答案: A解析: 暂无解析 -
第13题:
某测绘单位承担了某测区基础控制测量工作,测区面积约1800km2,地势平坦,无CORS网络覆盖。工作内容包括10个GPS C级点GPS联测、三等水准连测及建立测区高程异常拟合模型,测量基准采用2000国家大地坐标系(CGCS2000)及1 985国家高程基准。
测区已有资料情况:测区周边均匀分布有3个国家GPS B级框架点,一条二等水准路线经过测区。
观测设备采用经检验合格的双频GPS接收机(5mm+1ppm)3台套,DS1水准仪1套。
技术要求:GPS C级网按同步环边连接式布网观测;按照三等水准连测GPS C级点高程;
采用函数f(χ,y)=a0+a1x+a2y+a3χ2 +a4 y2+a5χy计算测区高程异常拟合模型。
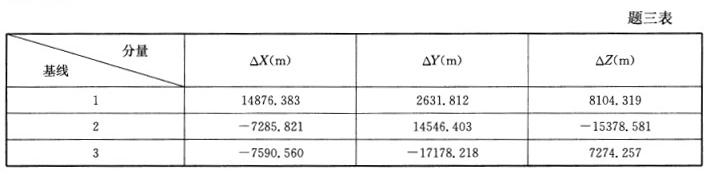
经GPS观测、水准连测及数据平差处理,获得了GPS C级点的CGCS2000坐标及1985高程成果。某GPS三边同步环各坐标分量情况统计见表。
拟合方法:利用GPS C级成果计算测区高程异常拟合模型。经检验精度为±0.05m。
问题:
1.本工程共能建立几个同步环?计算本工程的独立基线数有几条?
2.根据本项目给出的某同步环给出的数据(见表)计算各坐标分量残差与同步环闭合差。
3.简述测区高程异常拟合模型的建立过程,如何检验本项目高程异常拟合模型的精度?
答案:解析:1.本工程共需建立几个同步环?计算本工程的独立基线数有几条?
答:由题意,GPS控制点数n=10+3,接收机数k=3。 3台接收机只能构成一个简单的三角形同步图形,边连接是指相邻的同步图形间有一条边(即两个公共点)相连,3台GPS接收机为了完成C级测量,至少要构成v=8个同步图形,两个同步图形有u=2个公共点,全网观测时段数C=11;基线向量总数J总=C*k*(k-1)/2=33条;独立基线向量数J独=C*(k-1)=1 1*2=22条。
2.根据本项目给出的某同步环给出的数据(见表)计算各坐标分量残差与
同步环闭合差。
答:各坐标分量残差:
Wχ=14876. 383+(-7285. 821)+(-7590. 560)=-0.002m
Wy=2631.812+14546. 403+(-17178. 218)=-0.003m
Wz=8104. 319+( -153 78. 581) +7 274. 25 7=-0.005m
同步环闭合差:

3.简述测区高程异常拟合模型的建立过程,如何检验本项目高程异常拟合
模型的精度?
答:(1)测区高程异常拟合模型的建立过程:
①选点:
选取n个(n一般要求大于待估参数个数,本题待估参数为6)在测区内分布
合适的公共点(同时具有三等水准高程和GPS大地高的点)。设各点数据为(χi,yi,Hi,hi,其
中i=1,2,…,n),H为大地高,h为水准高程。
②坐标重心化:
计算重心坐标:
 ,其中i=1,2,…,n
,其中i=1,2,…,n
公共点坐标重心化:
 ,其中i=1,2,…,n
,其中i=1,2,…,n坐标重心化的目的是提高计算精度(注:坐标重心化不是必须要做的)。
③计算高程异常:
计算公共点高程异常:ξi=Hi-hi,其中i=1,2,…,n
④建立误差方程:
按公式
 建立误差方程,v为改
建立误差方程,v为改正数。
应用最小二乘原理计算得到待估参数aj的估值
 (其中j=1,2,…,6)。
(其中j=1,2,…,6)。⑤建立拟合模型:
测区待定点k的高程异常按以下模型计算:

拟合的水准高程为:

(2)检验本项目高程异常拟合模型的精度:
①按上述似大地水准面模型计算的各检验点高程异常ξ计与其实测高程异常ξ测计算高
程异常不符值△(△=ξ计-ξ测);
②计算高程异常不符值的中误差,作为似大地水准面精度检验。
(3)求取参与拟合的联测点拟合后的中误差,可得内符合精度,将检核点代入模型计算,求
取得到的中误差即为外符合精度。
-
第14题:
我国海图一般采用的坐标系统是()。
- A、WGS-84坐标系
- B、1980西安坐标系
- C、1954北京坐标系
- D、CGCS2000坐标系
正确答案:D -
第15题:
《全球定位系统(GPS)测量规范》GB/T18314—2009基本规定内容为()
- A、GPS测量采用2000国家大地坐标系统及GPS时间系统,手簿记录采用世界协调时(UTC.
- B、用于各级GPS网测量的仪器应经法定计量检定合格,并在检定有效期内使用
- C、中误差作为各级GPS网测量精度的技术指标,且以2倍中误差作为极限误差
- D、应按坐标转换方法求得1980西安坐标系、1954北京坐标系或其他坐标系成果
正确答案:A,B,C,D -
第16题:
GPS相对定位解算出的基线向量()。
- A、属于WGS-84坐标系
- B、属于ITRF坐标框架
- C、属于CGCS2000坐标系
- D、与采用的星历数据所属的坐标系相同
正确答案:D -
第17题:
CGCS2000大地坐标系原点在(),是右手地固直角坐标系, Z轴为国际地球旋转局参考极方向。
正确答案:地心 -
第18题:
填空题在定义上,CGCS2000与WGS84是()的,即关于坐标系原点、尺度、定向及定向演变的定义都是()的。正确答案: 一致,相同解析: 暂无解析 -
第19题:
判断题在进行GPS网平差计算时,从测绘局等国家权威机构购买的1954年北京坐标系控制点资料可不加筛选地作为GPS网的已知起算数据使用。A对
B错
正确答案: 对解析: 暂无解析 -
第20题:
多选题就CGCS2000坐标系所依据的2000国家GPS网数据处理结果而言,下列说法正确的是()A相对精度为10-5-10-6
B参考框架为ITRF2000
C参考框架为ITRF97
D参考历元为2000.0
正确答案: C,D解析: 暂无解析 -
第21题:
单选题某中等城市拟于2011年启动建立城市GPS控制网基础测绘项目,其城市坐标系统应当基于()建立A1954年北京坐标系
B2000国家大地坐标系
C1980西安坐标系
D城市独立坐标系
正确答案: D解析: 暂无解析 -
第22题:
单选题某中等城市拟于2011年启动建立城市GPS控制网基础测绘项目,其城市坐标系统应当基于( )建立。A1954北京坐标系
B2000国家大地坐标系
C1980西安坐标系
D城市独立坐标系
正确答案: B解析: -
第23题:
单选题GPS相对定位解算出的基线向量()。A属于WGS-84坐标系
B属于ITRF坐标框架
C属于CGCS2000坐标系
D与采用的星历数据所属的坐标系相同
正确答案: C解析: 暂无解析