
如果将人的眼睛、手脚、脑的功能与机器人进行类比,可分别对应机器人的感知系统、执行系统和()系统。
题目
如果将人的眼睛、手脚、脑的功能与机器人进行类比,可分别对应机器人的感知系统、执行系统和()系统。
相似考题
更多“如果将人的眼睛、手脚、脑的功能与机器人进行类比,可分别对应机器人的感知系统、执行系统和()系统。”相关问题
-
第1题:
工业机器人有哪些系统组成()A、执行机构
B、驱动装置
C、控制系统
D、感知系统
参考答案:A,B,C,D
-
第2题:
按机器人结构坐标系统特点可将机器人分为( )。①直角坐标机器人;②圆柱坐标机器人;③球面坐标机器人;④关节坐标机器人A.①②
B.①②③
C.①②④
D.①②③④
参考答案:D
-
第3题:
下列关于属于机器人系统组成的是()
A.机器人控制柜、安全门锁、示教器、同步开关
B.机器人控制柜、安全门锁、计算机控制系统、同步开关
C.机器人控制柜、计算机控制系统、示教器、同步开关
D.机器人夹具、计算机控制系统、示教器、安全门锁
正确答案:A
-
第4题:
配置智能机器人巡检系统的变电站,可由智能机器人完成红外普测和精确测温,由专业人员进行复核。( )答案:对解析: -
第5题:
配置智能机器人巡检系统的变电站,应由智能机器人完成红外普测和精确测温,不必再由专业人员进行复核。答案:错解析: -
第6题:
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
????某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
????该系统的主要功能描述如下:
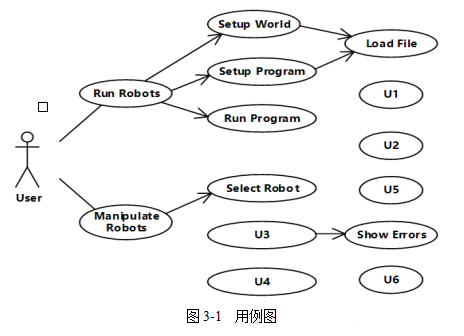
????(1)机器人探索虚拟世界(Run Robots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(Load File)从而在仿真系统中建立虚拟世界(Setup World)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(Setup Program)。机器人在虚拟世界中探索时(Run Program),有2种运行模式:
????①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(Instruction Set)。
????②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
????(2)手动控制机器人(Manipulate Robots)。选定1个机器人后(Select Robot),可以采用手动方式控制它。手动控制有4种方式:
????①Move:机器人朝着正前方移动一个交叉点。
????②Left:机器人原地沿逆时针方向旋转90度。
????③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
????④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(Show Errors)。
????手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
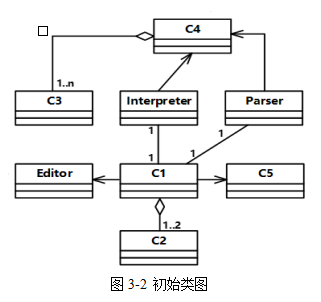
????现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
【问题1】(6分)
????根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
????图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分) ???
????根据说明中的描述,给出图3-2中C1~C5所对应的类名。答案:解析:【问题1】(6分)
U1、U2、U3、U4、U5、U6:Run、Step、Write、Move、Left、Read
【问题2】(4分)
U1和U2和Run Program有泛化关系;U3,U4,U5,U6和Select Robot有扩展关系;
【问题3】(5分)
C1:文件
C2:机器人在虚拟世界的行为
C3:Instruction
C4:InstructionSet
C5:仿真系统 -
第7题:
机器人感知自身或者外部环境变化信息是依靠()。
- A、传感系统
- B、机构部分
- C、控制系统
- D、以上都包括
正确答案:A -
第8题:
关闭机器人系统的步骤?
正确答案: 退出选择的操作方式(示教,编辑,运行)将机械手返回到参考点;
关闭电源;
关闭在控制柜上面的主开关;
在关闭电源时,确保从驱动器中取出磁盘;
将操作方式选择开头旋转到OFF位置并用钥匙锁住,确保系统不能被重新启动。 -
第9题:
工业机器人按系统功能可分为专用机器人、通用机器人、示教再现机器人、智能机器人。()
正确答案:正确 -
第10题:
机器人的“心脏”是机器人的哪个部分()。
- A、动力系统
- B、控制单元
- C、传感器
- D、输出系统
正确答案:B -
第11题:
配置智能机器人巡检系统的变电站,可由智能机器人完成红外()和精确测温,由专业人员进行复核。
正确答案:普测 -
第12题:
单选题现代机器人的研究始于20世纪中期,20世纪80年代将具有感觉、思考、决策和动作能力的系统称为()A空间机器人
B智能机器人
C软件机器人
D网络机器人
正确答案: B解析: 暂无解析 -
第13题:
工业机器人通常由()组成。
A、执行机构
B、驱动装置
C、控制系统
D、传感系统
参考答案:ABCD
-
第14题:
集控式足球机器人的智能主要表现在()两个子系统。
A、机器人通信子系统
B、机器人视觉子系统
C、机器人决策子系统
D、机器人总控子系统
参考答案:CD
-
第15题:
配置机器人巡检系统的变电站,机器人可巡视的设备可由机器人巡视代替人工例行巡视。答案:对解析: -
第16题:
配置智能机器人巡检系统的变电站,可由智能机器人完成红外普测和精确测温,由( )人员进行复核。运维$; $检修$; $运行$; $专业答案:D解析: -
第17题:
《变电运维管理规定》:配置机器人巡检系统的变电站,机器人可巡视的设备( )。可由机器人巡视代替人工例行巡视$; $可由机器人巡视和人工例行巡视同时进行$; $可由机器人巡视和人工例行巡视交替进行$; $可不可代替人工例行巡视答案:A解析: -
第18题:
关于机器人,下列说法正确的是()?
- A、机器人驱动方式有电力驱动、液压驱动,气压驱动
- B、工业机器人可用于恶劣环境,工作强度大、时间长
- C、机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成
- D、机器人可以代替人类完成一些危险或难以进行的劳作、任务等
正确答案:A,B,C,D -
第19题:
现代机器人的研究始于20世纪中期,20世纪80年代将具有感觉、思考、决策和动作能力的系统称为()
- A、空间机器人
- B、智能机器人
- C、软件机器人
- D、网络机器人
正确答案:B -
第20题:
机器人系统的结构一般由机器人组成。感知机器人自身或外部环境变化信息是依靠()完成。
- A、传感器组
- B、机构部分
- C、控制部
- D、信息处理
正确答案:A -
第21题:
下列关于属于机器人系统组成的是().
- A、机器人控制柜、安全门锁、示教器、同步开关
- B、机器人控制柜、安全门锁、计算机控制系统、同步开关
- C、机器人控制柜、计算机控制系统、示教器、同步开关
- D、机器人夹具、计算机控制系统、示教器、安全门锁
正确答案:A -
第22题:
通常认为,()属于人工智能的研究范畴。
- A、机器人、专家系统和决策支持系统
- B、专家系统、决策支持系统和智能检索
- C、专家系统、自然语言理解和机器人
- D、专家系统、数据仓库和信息检索
正确答案:C -
第23题:
配置智能机器人巡检系统的变电站,可由智能机器人完成()和(),由专业人员进行复核。
正确答案:红外普测;精确测温 -
第24题:
填空题机器人电器驱动系统中,()是其执行元件。正确答案: 马达解析: 暂无解析