
单选题对于稳态、非稳态、显格式或隐格式离散方程组的求解,下列说法中正确的是( )。[2013年真题]A 显格式离散方程组求解永远是发散的B 隐格式离散方程组求解是收敛的C 时间采用隐格式、空间采用显格式是收敛的D 稳态条件下的各种差分格式都是收敛的
题目
显格式离散方程组求解永远是发散的
隐格式离散方程组求解是收敛的
时间采用隐格式、空间采用显格式是收敛的
稳态条件下的各种差分格式都是收敛的
相似考题
更多“对于稳态、非稳态、显格式或隐格式离散方程组的求解,下列说法中正确的是( )。[2013年真题]”相关问题
-
第1题:
对于稳态、非稳态、显格式或隐格式离散方程组的求解,下列说法中正确的是( )。
A. 显格式离散方程组求解永远是发散的
B. 隐格式离散方程组求解是收敛的
C. 时间采用隐格式、空间采用显格式是收敛的
D. 稳态条件下的各种差分格式都是收敛的答案:B解析:AC两项,内节点显式差分方程使用具有稳定性条件,即和的选择要满足:
错误;B项,而隐式差分格式是无条件使用的,和的选择相互独立,正确;D项,稳态条件下的中心差分格式也有可能是发散的,错误。 -
第2题:
对于一维非稳态导热的有限差分方程,如果对时间域采用显式格式进行计算,则对于内部节点而言,保证计算稳定性的判据为( )。A.Fo≤1
B.Fo≥1
C.
D. 答案:C解析:
答案:C解析:
-
第3题:
对于题12图中二维稳态导热问题,右边界是绝热的。如果采用有限差分法求解,当Δx=Δy时,则正确的边界节点方程是( )。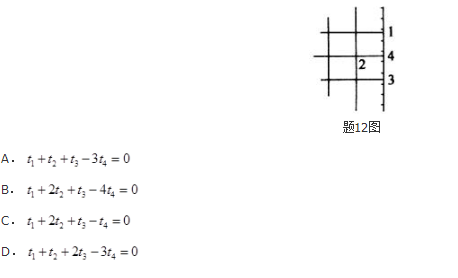 答案:B解析:边界节点离散方程在第一类边界条件下,因边界节点的温度已给定,无需建立边界节点的方程,其温度值会进入到与之相邻的内节点方程中。对于第二及第三类边界条件,则必须建立边界节点的节点方程,从而使整个节点方程组封闭,利于求解。则根据图2列节点4的热平衡方程
答案:B解析:边界节点离散方程在第一类边界条件下,因边界节点的温度已给定,无需建立边界节点的方程,其温度值会进入到与之相邻的内节点方程中。对于第二及第三类边界条件,则必须建立边界节点的节点方程,从而使整个节点方程组封闭,利于求解。则根据图2列节点4的热平衡方程
-
第4题:
下列说法正确的是()
- A、格式条款和非格式条款不一致的,应当采用格式条款
- B、格式条款和非格式条款不一致的,应当采用非格式条款
- C、格式条款和非格式条款一致的,应当采用非格式条款
正确答案:B -
第5题:
对于非稳态导热问题,温度对时间的导数采用向后差分,将()
- A、通过变换,显式和隐式都可得到
- B、显式和隐式都无法得到
- C、得到显式差分格式
- D、得到隐式差分格式
正确答案:D -
第6题:
单选题哈特里奇烟度计可对内燃机的下列工况的烟度进行测量()。A稳态
B非稳态
C稳态+非稳态
D稳态+非稳态+停车
正确答案: B解析: 暂无解析 -
第7题:
单选题关于单位反馈控制系统的稳态误差,下列表示不正确的是( )。[2010年真题]A稳态误差是系统调节过程中其输出信号与输入信号之间的误差
B稳态误差在实际中可以测量,具有一定的物理意义
C稳态误差由系统开环传递函数和输入信号决定
D系统的结构和参数不同,输入信号的形式和大小差异,都会引起稳态误差的变化
正确答案: D解析:
稳态误差是指当系统从一个稳态过渡到新的稳态,或系统受扰动作用又重新平衡后,系统可能会出现的偏差,而不是输出信号与输入信号之间的误差,可以在实际中测量。控制系统的稳态误差不仅仅是由系统本身的特性(开环传递函数)决定的,还与输入函数(输入信号)有关。同一个系统在输入信号不同时,可能有不同的稳态误差。 -
第8题:
单选题对于非稳态导热问题,温度对时间的导数采用向后差分,将()A通过变换,显式和隐式都可得到
B显式和隐式都无法得到
C得到显式差分格式
D得到隐式差分格式
正确答案: A解析: 暂无解析 -
第9题:
单选题不稳态导热采用有限差分方法求解温度场,关于差分方程,下列说法错误的是( )。A显式差分格式是温度对时间的一阶导数采用向前差分获得,具有稳定性条件
B隐式差分格式是温度对时间的一阶导数采用向后差分获得,没有稳定性条件
C显式差分格式中温度对位置的二阶导数采用中心差分格式获得
D隐式差分格式是温度对位置的二阶导数采用向后差分获得
正确答案: D解析:
显式差分格式中,温度是对时间的一阶导数,采用向前差分;温度是对位置的二阶导数,采用中心差分格式,具有稳定性条件。隐式差分格式中,温度是对时间的一阶导数,采用向后差分;温度是对位置的二阶导数,采用中心差分格式,没有稳定性条件。 -
第10题:
多选题下列有关格式条款的说法中,正确的是( )。A在订立合同的时候提供的格式条款没有与对方协商
B格式条款又称格式合同
C提供格式条款的一方没有向对方提示免责条款的义务
D格式条款和非格式条款不一致时采用非格式条款
正确答案: C,A解析: 本题考核格式条款的有关规定。提供格式条款的一方有提示说明的义务,应当采取合理的方式提请对方注意免除或限制其责任的条款,按照对的要求对该条款予以说明。 -
第11题:
单选题对于一维非稳态导热的有限差分方程,如果对时间域采用显式格式进行计算,则对于内部节点而言,保证计算稳定性的判据为( )。[2008年真题]AFo≤1
BFo≥1
CFo≤1/2
DFo≥1/2
正确答案: D解析:
对非稳态导热的显式格式,其数值解的稳定性要受到稳定性条件的限制。对于内部节点的稳定性条件是:Fo≤1/2;对于第三类边界条件的稳定性条件是:Fo≤1/(2Bi+2)。 -
第12题:
单选题下列说法正确的是()A格式条款和非格式条款不一致的,应当采用格式条款
B格式条款和非格式条款不一致的,应当采用非格式条款
C格式条款和非格式条款一致的,应当采用非格式条款
正确答案: A解析: 暂无解析 -
第13题:
常见导热数值计算中较多使用的差分格式是( )。A. 边界点采用热量守恒法求离散方程
B. 非稳态时,时间和空间坐标均采用隐格式差分格式
C. 非稳态时均采用中心差分格式
D. 非稳态时,空间坐标采用向前或向后差分格式,时间坐标采用中心差分格式答案:A解析:热量守恒法表示导入任一节点的导热量的代数和为零,它适用的范围比较广,对于导热系数是温度的函数或者是内热源分布不均匀的情况容易列差分方程,所以热量守恒法在导热数值计算中较多采用;隐式差分格式方程取温度对x的二阶导数为中心差分格式,而温度对时间的一阶导数为向后差分格式;在求解不稳定导热问题时,对于温度对时间的一阶导数不应采用中心差分格式,因为这将导致数值解的不稳定。 -
第14题:
对于一维非稳态导热的有限差分方程,如果对时间域采用显式格式进行计算,则对于内部节点而言,保证计算稳定性的判据为( )。
A. Fo≤1
B. Fo≥1
C. Fo≤1/2
D. Fo≥1/2答案:C解析:对非稳态导热的显式格式,其数值解的稳定性要受到稳定性条件的限制。对于内部节点的稳定性条件是:Fo≤1/2;对于第三类边界条件的稳定性条件是:
-
第15题:
稳态噪声是指在()内,声级起伏不大于()的噪声。工业企业厂界噪声测量时,对于稳态噪声应测量()的等效声级。非周期非稳态噪声测量整个()的等效声级。
正确答案:测量时间;3dB;1分钟;正常工作时间 -
第16题:
下面关于比例式自动驾驶仪控制俯仰姿态的阐述中,正确的是().
- A、如存在常值力矩干扰,有稳态静差
- B、对于位置输入信号,有稳态误差
- C、对于斜坡输入信号,没有稳态误差
- D、在常值力矩干扰作用,没有稳态静差
正确答案:C -
第17题:
单选题关于单位反馈控制系统中的稳态误差,下列表示不正确的是( )。[2010年真题]A稳态误差是系统调节过程中其输出信号与输入信号之间的误差
B稳态误差在实际中可以测量,具有一定的物理意义
C稳态误差由系统开环传递函数和输入信号决定
D系统的结构和参数不同,输入信号的形式和大小差异,都会引起稳态误差的变化
正确答案: A解析:
稳态误差是指当系统从一个稳态过渡到新的稳态,或系统受扰动作用又重新平衡后,系统可能会出现的偏差,而不是输出信号与输入信号之间的误差。系统的稳态误差,不仅与开环传递函数的结构有关,还与输入信号密切相关。 -
第18题:
单选题采用对流换热边界层微分方程组,积分方程组或雷诺类比法求解对流换热过程中,正确的说法是( )。[2010年真题]A微分方程组的解是精确解
B积分方程组的解是精确解
C雷诺类比的解是精确解
D以上三种均为近似值
正确答案: A解析:
对流换热的求解方法包括分析法、类比法和实验法。分析法包括微分方程组求解和积分方程组求解。在所有方法中,只有微分方程组的解是精确解;积分方程组的求解要先假设速度和温度的分布,因此是近似解;雷诺类比的解是由比拟理论求得的,也是近似解。 -
第19题:
名词解释题稳态扩散与非稳态扩散正确答案: 稳态扩散的特征是空间任意一点的浓度不随时间变化,扩散通量不随位置变化;非稳态扩散的特征是空间任意一点的浓度随时间变化,扩散通量随位置变化。解析: 暂无解析 -
第20题:
单选题非稳态一维导热过程采用显式差分法格式计算时,时间步长和空间步长之间要满足()AFo<0.5;
BFo>1;
CBi<0.1;
DFo<0.25。
正确答案: C解析: 暂无解析 -
第21题:
单选题对于单位阶跃输入,下列说法不正确的是( )。[2011年真题]A只有0型系统有稳态误差,其大小与系统的开环增益成反比
B只有0型系统有稳态误差,其大小与系统的开环增益成正比
CⅠ型系统位置误差系数为无穷大时,稳态误差为0
DⅡ型及以上系统与Ⅰ型系统一样
正确答案: B解析:
AB两项,对于单位阶跃输入,0型系统的位置误差系数Kp=K,稳态误差ess=1/(1+Kp)=1/(1+K)。因此,0型系统在单位阶跃输入下是有稳态误差的,其大小与系统的开环增益K成反比。CD两项,对于单位阶跃输入,Ⅰ型系统及Ⅰ型以上的系统的位置误差系数Kp=∞,稳态误差ess=1/(1+Kp)=0。 -
第22题:
填空题稳态噪声是指在()内,声级起伏不大于()的噪声。工业企业厂界噪声测量时,对于稳态噪声应测量()的等效声级。非周期非稳态噪声测量整个()的等效声级。正确答案: 测量时间,3dB,1分钟,正常工作时间解析: 暂无解析 -
第23题:
单选题常见导热数值计算中较多使用的差分格式是( )。[2016年真题]A边界点采用热量守恒法求离散方程
B非稳态时,时间和空间坐标均采用隐式差分格式
C非稳态时均采用中心差分格式
D非稳态时,空间坐标采用向前或向后差分格式,时间坐标采用中心差分格式
正确答案: C解析:
A项,热量守恒法表示导入任一节点的导热量的代数和为零,它适用的范围比较广,对于导热系数是温度的函数或者是内热源分布不均匀的情况容易列差分方程,所以热量守恒法在导热数值计算中较多采用。BC两项,显示差分格式中,温度对x的二阶导数为中心差分格式,温度对时间的一阶导数为向前差分格式;隐式差分格式中,温度对x(空间坐标)的二阶导数为中心差分格式,而温度对时间的一阶导数为向后差分格式。当傅里叶准则数Fo≤1/2可以采用显式差分格式。但并不是所有情况都采用隐式差分格式方程。D项,在求解不稳定导热问题时,对于温度对时间的一阶导数不应采用中心差分格式,因为这将导致数值解的不稳定。