
轴J1、J2和J3的运动只有软件上的轴限位设置。
题目
轴J1、J2和J3的运动只有软件上的轴限位设置。
相似考题
更多“轴J1、J2和J3的运动只有软件上的轴限位设置。”相关问题
-
第1题:
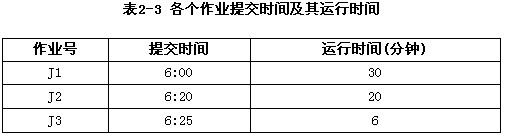
作业J1、J2、J3的提交时间和所需运行时间如表2-3所示。若采用响应比高者优先调度算法,则作业调度次序为(26)。
A.J1→J2→J3
B.J1→J3→J2
C.J2→J1→J3
D.J2→J3→J1
正确答案:B
解析:本题考查的是操作系统作业管理中作业调度算法方面的知识。根据题意有三个作业J1、J2、J3,它们到达输入井的时间分别为6:00、6:20、6:25,它们需要执行的时间分别为30分钟、 20分钟、6分钟。若采用响应比高者优先算法对它们进行调度,那么,系统在6:00时,因为系统输入井中只有作业J1,因此J1先运行。当作业J1运行完毕时,先计算作业J2和J3的响应比,然后令响应比高者运行。
响应比=作业周转时间/作业运行时间=1+作业等待时间/作业运行时间
作业J2的响应比=1+10/20=1.5
作业J3的响应比=1+5/6=1.83
按照响应比高者优先算法,优先调度J3。
综上分析可知,作业被选中执行的次序应是J1→J3→J2。 -
第2题:
设有一组作业,它们的作业提交时刻及估计运行时间如下所示:
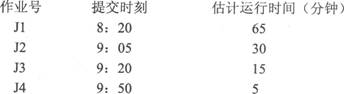
在单道批处理方式下,采用短作业优先调度算法,作业的执行顺序为( )。
A)J1,J4,J2,J3
B)J1,J3,J4,J2
C)J4,J2,J3,J1
D)J4,J1,J2,J3
正确答案:B
分析4个作业的到达时刻与运行时间:8:20只有作业1到达,先执行作业1;运行65分钟后时间为9:25,此时作业2和作业3已先后到达,等待运行;由于作业3中运行时间在两个作业中比较短,所以先执行作业3;作业3执行完,作业4也已经到达,因为作业4的运行时间为5分钟,所以先执行作业4;最后才执行作业2。 -
第3题:
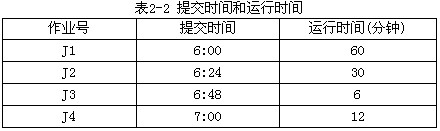
作业J1,J2,J3,J4的提交时间和运行时间如表2-2所示。若采用短作业优先调度算法,则作业调度次序为(1),平均周转时间为(2)分钟(这里不考虑操作系统的开销)。
A.J3→J4→J2→J1
B.J1→J2→J3→J4
C.J1→J3→J4→J2
D.J4→J3→J2→J1
正确答案:C
-
第4题:
J级航段的载重线分为J1、J2、J3级航段的载重线。
正确答案:错误 -
第5题:
将J3轴马达从机器人上卸下,J3轴不会坠落。
正确答案:错误 -
第6题:
机器人在运动过程中其每个轴的运动范围是有限制的,因此需设置软硬限位,软限位的设置需和硬限位设置一样。
正确答案:错误 -
第7题:
铁路机车车辆驾驶证中,()驾驶证准驾动车组和电力机车。
- A、J1类
- B、J2类
- C、J3类
正确答案:C -
第8题:
DS6-K5B型计算机联锁系统的PIO模块的联机插座(J1~J5),其中用于短电缆连接不对外引出的插座是()。
- A、J1和J2
- B、J2和J3
- C、J3和J4
- D、J4和J5
正确答案:D -
第9题:
S700K外锁闭道岔转辙机额定转换力/最大转换力J1,J2,J3,X1,X2依次为()
正确答案:3000/3500、3000/3500、4500/5000、2500/3000、6000/6900N -
第10题:
单选题已知刚体质心C到相互平行的 1、 2轴的距离分别为a,b,刚体的质量为m,对 2。轴的转动惯量为J2,则对 1轴的转动惯量J1的计算公式()。AJ1=J2+m(a+B.2
BJ1=J2+m(a2-b2)
CJ1=J2-m(a2-b2)
DJ1=J2
正确答案: B解析: 暂无解析 -
第11题:
填空题S700K外锁闭道岔转辙机额定转换力/最大转换力J1,J2,J3,X1,X2依次为()正确答案: 3000/3500、3000/3500、4500/5000、2500/3000、6000/6900N解析: 暂无解析 -
第12题:
判断题J级航段的载重线分为J1、J2、J3级航段的载重线。A对
B错
正确答案: 错解析: 暂无解析 -
第13题:
作业J1,J2,J3的提交时间和运行时间如表2-1所示。若采用响应比高者优先调度算法,则作业调度次序为______。

A.J1→J2→J3
B.J1→J3→J2
C.J2→J1→J3
D.J2→J3→J1
正确答案:B
解析:首先看作业的提交时间,J1最早为6:00,所以首先运行。在运行30分钟也就是6:30时,J1运行完毕,此时需要计算J2、J3的响应比,也就是作业周转时间/作业运行时间,即1+作业等待时间/作业运行时间。在6:30时,J2的等待时间为10分钟,J3的等待时间为5分钟。所以:J2的响应比=1+10/20=1.5J3的响应比=1+5/6=1.83根据响应比高者优先算法,优先调度J3。所以,在J1运行完成后,先运行J3,然后再运行J2。综上所述,本题的正确答案为选项B。 -
第14题:
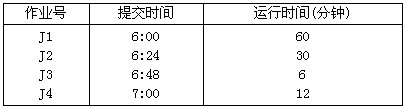
作业J1,J2,J3,J4的提交时间和运行时间如下表所示。若采用短作业优先调度算法,则作业调度次序为(18),平均周转时间为(19)分钟(这里不考虑操作系统的开销)。
A.J3→J4→J2→J1
B.J1→J2→J3→J4
C.J1→J3→J4→J2
D.J4→J3→J2→J1
正确答案:C
解析:本题考查操作系统中作业调度算法和性能评价方面的基础知识。
在单道批量处理中,作业调度通常采用下述三种算法:
▲ 先来先服务:按作业到达先后进行调度,即启动等待时间最长的作业。
▲ 短作业优先:以要求运行时间长短进行调度,即启动要求运行时间最短的作业。
▲ 响应比高优先:响应比高的作业优先运行。
采用短作业优先调度算法的优点是易于实现,该算法强调了资源的充分利用,保证了系统的最大吞吐量(单位时间里处理作业的个数)。但是该算法的缺点是不公平,会造成“饥饿”现象,即“长作业”长期等待。
本题由于在6点时只有一个作业J1提交,所以,J1先运行。7点时J1运行结束,此时系统中J2,J3,J4都已提交,按照短作业优先调度算法作业的运行顺序为J3→J4→J2,所以,试题(18)的正确答案为C。
平均周转时间计算如下:
-
第15题:
若后备作业队列中等待运行的同时有三个作业J1、J2、J3,已知它们各自的运行时间为a、b、c,且满足a
正确答案: 采用短作业优先算法调度时,三个作业的总周转时间为:
T1=a+(a+b)+(a+b+c)=3a+2b+c ①
若不按短作业优先算法调度,不失一般性,设调度次序为:J2、J1、J3。则三个作业的总周转时间为:
T2=b+(b+a)+(b+a+c)=3b+2a+c ②
令②-①式得到:
T2-T1=b-a>0
可见,采用短作业优先算法调度才能获得最小平均作业周转时间。 -
第16题:
更换J2,J3轴马达前,必须准备好起吊装置,防止坠落。
正确答案:正确 -
第17题:
检查易于()轴可动部位以及外围设备发生相互干涉的固定电缆
- A、J1/J2/J3
- B、J1/J4/J3
- C、J3/J2/J4
正确答案:A -
第18题:
在作业调度中,若采用优先级调度算法,为了尽可能使CPU和外部设备并行工作,有如下三个作业:J1以计算为主,J2以输入输出为主,J3计算和输入输出兼顾,则它们的优先级从高到低的排列顺序是()。
- A、J1,J2,J3
- B、J2,J3,J1
- C、J3,J2,J1
- D、J2,J1,J3
正确答案:C -
第19题:
正线客专线P60-18道岔J1锁闭量();J2锁闭量(),J3锁闭量(),X1锁闭量(),X2锁闭量()。
正确答案:≥30mm;≥20mm;≥20mm;≥30mm;≥20mm -
第20题:
经纬仪有光学经纬仪和电子经纬仪两类,其中光学经纬仪目前广泛使用,其代号“J”,按精度划分()。
- A、J1、J2、J6三级
- B、J0.5、J1、J15三级
- C、J1、J2、J6、J15四级
- D、J1、J2、J3、J4四级
正确答案:C -
第21题:
检查机床回零开关是否正常,运动有无爬行情况。各轴运动极限的()工作是否起作用。
- A、软件限位和硬件限位
- B、软件限位或硬件限位
- C、软件限位
- D、硬件限位
正确答案:A -
第22题:
问答题若后备作业队列中等待运行的同时有三个作业J1、J2、J3,已知它们各自的运行时间为a、b、c,且满足a正确答案: 采用短作业优先算法调度时,三个作业的总周转时间为:
T1=a+(a+b)+(a+b+c)=3a+2b+c ①
若不按短作业优先算法调度,不失一般性,设调度次序为:J2、J1、J3。则三个作业的总周转时间为:
T2=b+(b+a)+(b+a+c)=3b+2a+c ②
令②-①式得到:
T2-T1=b-a>0
可见,采用短作业优先算法调度才能获得最小平均作业周转时间。解析: 暂无解析 -
第23题:
填空题正线客专线P60-18道岔J1锁闭量();J2锁闭量(),J3锁闭量(),X1锁闭量(),X2锁闭量()。正确答案: ≥30mm,≥20mm,≥20mm,≥30mm,≥20mm解析: 暂无解析