
在机构中采用虚约束的目的是为了改善机构的运动状况和()。
题目
在机构中采用虚约束的目的是为了改善机构的运动状况和()。
相似考题
更多“在机构中采用虚约束的目的是为了改善机构的运动状况和()。”相关问题
-
第1题:
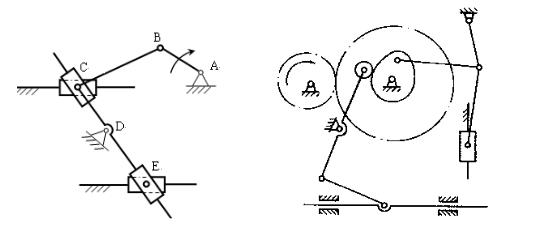
简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。

机构具有确定相对运动的条件是机构的自由度数目等于机构中原动件的数目。
即W=F>0。
机构中,n=9,pL=12,pH=1
F=3n-2pL-pH=2=W>0,所以机构运动确定。
C处复合铰链,E处虚约束,F处局部自由度。
略 -
第2题:
指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们是否具有确定的运动。
(1)C点有复合铰链
E点为虚约束
F=3×5-2×7=1
有确定的运动。
(2)图中有一处虚约束,一处复合铰链,一处局部自由度。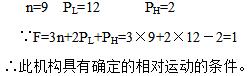
略 -
第3题:
机构中的虚约束都是在特定的几何条件下出现的。
正确答案:正确 -
第4题:
在气阀机构采用旋阀器的目的中不正确的是()
- A、自动清除阀面与阀座间的积炭
- B、减少阀盘受热,降低热负荷
- C、使阀盘受热均匀,改善热应力状况
- D、防止阀杆在导管中卡住
正确答案:B -
第5题:
由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束
正确答案:错误 -
第6题:
在平面机构中,具有两个约束的运动副是()副,具有一个约束的运动副是()副。
正确答案:低;高 -
第7题:
机构中的复合铰链是指();局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
正确答案:由三个或三个以上构件组成同一回转轴线的转动副 -
第8题:
在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
正确答案:正确 -
第9题:
单选题在机构中,某些不影响机构运动传递的重复部分所带入的约束为()A虚约束
B局部自由度
C复合铰链
D真约束
正确答案: A解析: 暂无解析 -
第10题:
多选题虚约束的作用()A保证运动的连续性
B改善受力状态
C扩大基本机构的功能
D改善运动规律
E减少了机构的功能
正确答案: C,D解析: 暂无解析 -
第11题:
单选题下列关于虚约束的说法错误的是:()A增加构件的刚性
B改变机构的自由度
C改善其受力情况
D使机构运动顺利
正确答案: C解析: 暂无解析 -
第12题:
单选题对整个机构的运动不起作用的约束是()A虚约束
B实约束
C局部约束
D固定约束
正确答案: B解析: 暂无解析 -
第13题:
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。

F.3n-2PL-PH=3×6-2×8-1=1
F处为虚约束;B处为复合铰链;G处为局部自由度。
机构运动确定。
略 -
第14题:
在机构中采用虚约束的目的是为了改善机构的()和()。
正确答案:工作情况;受力情况 -
第15题:
在机构中采用虚约束的目的是为了改善机构的运动状况和()。
正确答案:受力情况 -
第16题:
虚约束对运动不起真正的约束作用,那么机构中为什么要引入虚约束?
正确答案:虚约束对运动虽不起真正的约束作用,但是考虑机构的受力均衡,避免运动不确定,增加传递的功率等设计时要加入虚约束。 -
第17题:
在机构中,某些不影响机构运动传递的重复部分所带入的约束为()。
- A、虚约束
- B、局部自由度
- C、复合铰链
正确答案:A -
第18题:
在机构中与其他约束重复而不起限制运动的约束称为()。
正确答案:虚约束 -
第19题:
从机构的运动观点来看,虚约束对机构的运动没有影响。
正确答案:正确 -
第20题:
填空题在机构中采用虚约束的目的是为了改善机构的()和()。正确答案: 工作情况,受力情况解析: 暂无解析 -
第21题:
填空题机构中采用虚约束的目的是为了()状况。正确答案: 改善构件的刚性和机构受力解析: 暂无解析 -
第22题:
判断题虚约束是在机构中存在的多余约束,计算机构自由度时应除去。A对
B错
正确答案: 对解析: 暂无解析 -
第23题:
单选题在机构中引入虚约束,往往是为了改善机构的受力状况或增加机构的()。A摩擦力
B灵活性
C刚度
D力矩
正确答案: A解析: 暂无解析 -
第24题:
填空题在机构中采用虚约束的目的是为了改善机构的运动状况和()。正确答案: 受力情况解析: 暂无解析



